ベクター・ジャパンとゼットエムピー(ZMP)は5月18日、ベクター・ジャパンの適合ツール「CANape」とZMPのカーロボティクス・プラットフォーム「RoboCar」を、汎用的な測定適合プロトコル「XCP」で接続することで合意したことを発表した。
ベクター・ジャパンの提供するCANapeは、Adaptive Crouse Control(ACC)の測定および適合が可能で、これをRoboCarに適用することで、実車なしに次世代自動車の開発が可能となり、開発速度の向上や教育、研修などを行うことが可能となる。

|
|
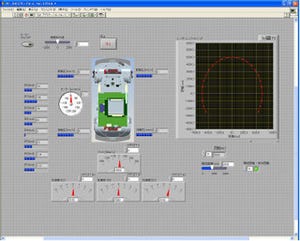
CANapeとRoboCarによる車両制御開発環境の実現例 |
また、RoboCarとCANapeはXCPで接続されることから、RoboCarに接続されている各センサのみならず、制御しているソフトウェアの動作の視覚化も可能となることから、その動作結果に基づき、動作を決定する定数の変更もCANape上から行うことが可能となる。
さらに、RoboCarの開発で用いられたCANapeは、そのまま実際の車両に同じ開発環境として使用することが可能なほか、RoboCarの開発に使用した測定データとの比較や決定した制御定数などの移行も可能となっている。