ここ10年間では、飛翔生物の優れた飛行性能を模倣したさまざまなタイプの羽ばたき翼型飛行ロボットが開発されてきた。しかし、地球上の高高度のような低大気密度環境下で羽ばたき翼型飛行ロボットの実験を行った研究はほとんどないとしている。
また、低大気密度環境下では羽ばたく翼の変形が地上付近とは本質的に異なり、周囲の空気力学、翼の構造力学、動力学の動的バランスによって生じている翼の動きの事前の予測が困難なため、目標の機体重量を維持する揚力を生成する翼の大きさや動作を設計し開発することが不可能だったという。さらに、低大気密度環境下では空気中(海面)や水中と比べて実験が難しく、飛行する動物の動きを観察することが困難だったため、動物の形態や動きを単純に模倣することは叶わなかったとする。
そこで研究チームは今回、ハチドリを規範とした無尾翼羽ばたき翼型飛行ロボットのロボハチドリ信州を開発し、空気密度0.360kg/m3(9000m)から1.184kg/m3(海面)の範囲で、翼の動きと空気力の同時計測と生物飛行のスケーリング関係との比較を行ったとのことだ。
そして一連の解析結果から、単純に翼を高速で動かすのではなく、翼のサイズと羽ばたき周波数を上手く調整することにより、ロボットの翼が十分に大きな羽ばたき振幅と飛翔生物の翼の回転角変化に近い受動的な回転角変化を実現することに成功したとする。その結果、低大気密度環境下でも地上での空気力発生機構を活用した揚力発生が働き、羽ばたき翼型飛行ロボットのリフトオフに成功したとしている。
-
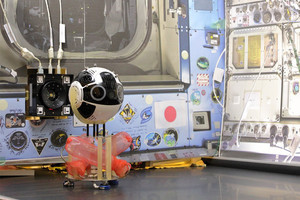
ロボハチドリ信州の高高度飛行環境模擬下のリフトオフ実験の高速度カメラ撮影画像。東北大 IFSの火星大気風洞の減圧チャンバーが利用され、大気密度は飛行高度9000mに相当する0.360kg/m3に設定された。ロボットの羽ばたき周波数は10.9Hz、カメラのサンプリング周波数は2000fps。ロボットは羽ばたき開始後0.864秒後にはリフトオフし、1.440秒後には初期位置から約167.4mm上昇。地上モデルは、羽ばたき周波数22.7Hzでリフトオフすることが可能。(出所:共同プレスリリースPDF)

研究チームは今回の研究成果について、羽ばたき翼特有の空気力学的メカニズムの活用による低密度・高高度環境下での飛行の実現可能性を示すものとなるとしたうえで、生物の高高度飛行メカニズムの理解とさらに低密度となる火星大気環境などでの羽ばたき翼型飛行ロボットの飛行実現につながる、重要な研究成果だといえるとしている。