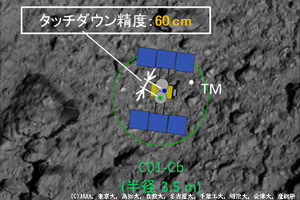
宇宙航空研究開発機構(JAXA)は7月25日、小惑星探査機「はやぶさ2」に関する記者説明会を開催し、同11日に実施した第2回タッチダウンの結果について、詳細を明らかにした。当日中の会見で、すでに目標とした「C01-Cb」領域への着陸に成功したことは分かっていたが、着陸位置の誤差はわずか60cmしかなかったことが判明したという。
-

はやぶさ2の着陸位置。ほぼ「ど真ん中」と言って良いだろう (C) JAXA、東京大、高知大、立教大、名古屋大、千葉工大、明治大、会津大、産総研

まずは、タッチダウン(日本時間10:06:18)の前後に撮影された以下の画像を見て欲しい。これは、10:03:54(高度約8.5m)から10:11:44(高度約150m)まで撮影した小型モニターカメラ「CAM-H」の画像を、10倍速動画に編集したものだ。接地した瞬間に弾丸を発射し、砂礫が舞い上がっている様子が非常に良く分かる。
小型モニターカメラ「CAM-H」で撮影した10倍速動画 (C) JAXA
なお1回目の着陸では、弾丸発射のトリガーとなったのは姿勢変化の検出であったが、今回はサンプラーホーンの変形だったという。この違いについては、接地した地点の凹凸状況の影響が大きいだろうとのこと。
-

LRF-S2で、サンプラーホーン先端までの距離を計測している。しきい値(16mm)を超える変化を検出した (C)JAXA

約1mの精度だった1回目に続き、高い精度での着陸を再び達成したことで、この精度が「たまたま」ではなく、実力であることを示した形。微小重力天体へのタッチダウンにおいて、はやぶさシリーズが採用したターゲットマーカーを使う手法の有効性が、改めて証明されたと考えて良いだろう。
ただ1回成功していたとは言え、今回の成功も決して簡単なものではなかった。特に大きな問題となっていたのは、1回目のタッチダウンで汚れてしまった光学系の性能低下だ。
タッチダウンの遂行には、ターゲットマーカーを捕捉する広角カメラ「ONC-W1」、地表近くで高度を調べるレーザーレンジファインダ(LRF)が不可欠。しかしレンズに付着した汚れによって受光量が大幅に低下しており、使える距離が短くなったり、計測誤差が大きくなったりしていた。
-

光学系の問題とその対策。様々なトラブルを抱えていた (C)JAXA

そのピンチを救ったのが、航法誘導制御の精度の高さだ。ONC-W1の光量が低下したため、ホバリングしてターゲットマーカーを捕捉する高度を、1回目の45mから30mまで下げる必要があった。しかし、地表に近くなると、ONC-W1で見える範囲が狭くなるので、より正確に、ターゲットマーカーの真上まで誘導することが求められる。
高度が45mであれば、精度は約26mで良かった。しかし高度を30mまで下げるのであれば、約17mの精度が必要になる。精度の要求が上がったことについて、航法誘導制御を担当したJAXAの大野剛氏は、「もし半年前に言われていれば不安だっただろうが、今回は自信を持っていた」という。
-

高度30mまでは「GCP-NAV」で降下、そこでターゲットマーカーを捕捉する (C)JAXA

はやぶさ2はこの高度まで、地上からの支援を利用する「GCP-NAV」という手法で水平方向の位置を制御する。5月末には、すでに改良した手法により、ターゲットマーカーを3mという高い精度で投下することに成功しており、今回も全く同じ手法で臨んだとのこと。この改良点については、過去記事が詳しいのでそちらを参照して欲しい。
-

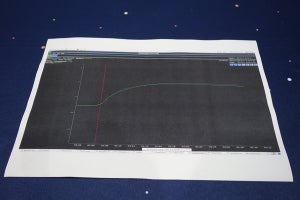
点線が目標の軌道で、赤線が実際の軌道。X方向もY方向も、最後の方で綺麗に収束している (C)JAXA

今回も、水平方向の誘導誤差は3m以下を実現。ターゲットマーカーは探し始めてすぐ、見つけることができた。はやぶさ2のピンポイントタッチダウンの精度には、ターゲットマーカーからの距離が大きく影響する。やや地味ながら、航法誘導制御の改善は、今回の成功にとって非常に大きな要因だったと言える。
光学系の問題では、そのほかにもさまざまな対策を施した。たとえばターゲットマーカーの輝度が低下するため、画像処理で2値化する際のしきい値も下げざるを得なかったが、そうするとチリや岩などの輝点をターゲットマーカーと誤認する可能性も増えてしまう。
しかしそういうものが明るいのは短時間だけで、すぐに暗くなる。JAXAの照井冬人ファンクションマネージャによれば、「捕捉するまでの時間も考慮して判断するようにした。一度ターゲットマーカーを捕捉したら、その近くしか見ないようになっていて、離れた場所に突然輝点が出ても無視する」とのことだ。
結果的に、今回のタッチダウンでは、ターゲットマーカーの捕捉後、一度も見失うことなく、しっかり追尾できていたという。最終降下前のホバリングでは、探査機の位置を誤差20cm以内に抑えられており、これが着陸精度60cmという結果に繋がった。
-

右のプロットが、ターゲットマーカーの認識位置。当初は中心、最終降下前はオフセット位置に正確に捕捉している (C)JAXA

ちなみにターゲットマーカーの捕捉には、DBT(Differential Bright object Tracking)とNBT(Normal Bright object Tracking)という、2種類の画像が使われる。DBTは、フラッシュ有りと無しの画像の差分を取ることで、ターゲットマーカーのみを浮かび上がらせるもの。一方NBTは、実際に画像に近いもので、2秒間隔でDBT/NBTを切り替える仕組みだ。
-

DBTの20倍速動画 (C)JAXA
-

NBTの20倍速動画 (C)JAXA
前回のタッチダウンでは、この両方を利用していたが、今回は太陽光の角度が悪く、NBTは信頼性が低下する可能性があったため、DBTのみを使用。すると画像の取得が4秒ごとになってしまうものの、精度に大きな問題は無いと判断した。実際、NBTはターゲットマーカーが見えなくなった時もあり、この判断は正しかったようだ。
照井氏は「まだ2回成功しただけなのであまり大きなことは言えないが、評価的にはまだ余裕があった」とコメント。前回は半径3m、今回は半径3.5mの領域への着陸だったが、もし仮に3回目をやるとしたら(実施しないことは決定済み)、さらに狭い領域であっても実現できた可能性もあったかもしれない。
なお今回の説明会では、タッチダウンの直前に撮影されたパノラマ画像が新たに公開された。探査機の下方を見ているONC-W1、側面を見ているONC-W2という2つの広角カメラは視野が一部重なっており、2枚の画像を繋げることで、パノラマ画像にすることができる。これは高度8mで撮影したもので、画像には人工クレーターがしっかり写っている。
-

公開されたパノラマ画像。様々なものが写っている (C)JAXA、千葉工大、東京大、高知大、立教大、名古屋大、明治大、会津大、産総研

このパノラマ画像では、人工クレーター、ターゲットマーカー、着陸地点を同時に見ることができる。地形の傾きから、ヒップアップ姿勢であることも分かる。撮影を担当した山田学氏(千葉工業大学 惑星探査研究センター 主任研究員)は、「様々なエッセンスが全て凝縮されている。カメラ担当としては渾身の1枚」と自信を見せた。
-

大成功の後ということで、はやぶさ2関係者の表情も晴れやかだった
-

説明会の最中、後ろのカーテンを開けるとそこにパノラマ画像が登場


今回のタッチダウンでは、探査機の南側(左側面)にクレーターが位置していたため、この撮影が可能だった。しかしターゲットマーカーの捕捉中は、その撮影に専念する必要があるため、他のことはできない。そこで、最終降下を開始して、捕捉に使わなくなったタイミングで、2枚セットの撮影を行うようシーケンスを入れたそうだ。
-

ONC-W1/W2の視野と、クレーターの位置関係の模式図。撮影には絶好の位置関係だった (C)千葉工大

これまで撮影した人工クレーターの画像は全て上方から見たものだったが、これは側面から見たものになり、高さ方向の情報を得やすい。広報的な意味だけでなく、サイエンス的な意義も大きいものになりそうだ。
また、今回の着陸地点を「うちでのこづち」と命名したことも公表された。はやぶさ2の2回のタッチダウンで採取できたサンプルは、まさに人類の宝物。ここからどんな科学的成果が生まれるのか。2020年末の地球帰還が今から待ち遠しい。
-

1回目の「たまてばこ」に続き、今回も日本の昔話から命名 (C)JAXA、東京大、高知大、立教大、名古屋大、千葉工大、明治大、会津大、産総研