若手研究者が中心となる「Team KUROSHIO」
Team KUROSHIOは、東京大学生産技術研究所(東大生産研)、海洋研究開発機構(JAMSTEC)、九州工業大学(九工大)、海上・港湾・航空技術研究所、三井造船、日本海洋事業、KDDI総合研究所の7者からなるチーム。発起人となったのは、4名の若手研究者だ。JAMSTECの中谷武志氏と大木健氏、東大生産研のソーントンブレア氏、九工大の西田祐也氏の4名が共同代表として同チームを牽引していく。中谷氏は「日本代表という意識を持ってチャレンジしていきたい」と意気込む。

|
Team KUROSHIOの共同代表を務めるJAMSTECの中谷武志氏(中央)、大木健氏(右)、九工大の西田祐也氏(左)。もう一人の共同代表である東大生産研のソーントンブレア氏はビデオ通話で記者会見に参加した。会見ではコンペティションで使う自立型海中ロボット(AUV)「AE2000a」と「AE2000f」が披露された |
Shell Ocean Discovery XPRIZEに向けてTeam KUROSHIOは、陸上にいるシステム管制員、自立型海中ロボット(AUV)、洋上中継器(ASV)からなるシステムを開発していく。AUVを用いた海底調査は通常、有人の支援母船が必要となるが、同システムでは、3台のAUVおよび1台のASVが、岸壁から離れ調査を行い岸壁に戻ってくるまでをすべて無人で行う。

|
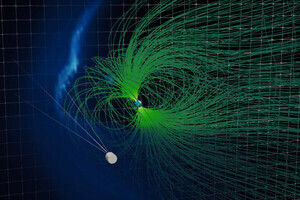
Team KUROSHIOの戦略。岸壁から調査エリアまでAUVおよびASVが無人航行。調査エリアに到着後、AUVは潜行を始める。深海調査では電磁波が使えないため、ASVが音響を利用してAUVの位置を計測する。AUVのステータスは通信衛星を利用して地上のオペレーターに送られる。必要があればオペレーター側からコマンドを送ることも可能。調査が終了したらAUVを回収し、岸壁まで戻ってくる |
このうち2台のAUVは、広範囲に移動することに特化した航行型の「AE2000a」と「AE2000f」。これまでにも、沖縄本島沖の海底熱水地帯調査などで使用されてきた。AE2000aにはインターフェロメトリソナーが搭載されており、海底地形のデータと海底の形質がわかる音響画像を得ることができる。一方、AE2000fにはTeam KUROSHIOの強みであるという独自開発の3D画像マッピング装置「SeaXerocks」が搭載されており、広範囲の海底について詳細な画像データを取得することが可能だ。また洋上のASVが、これらAUVの運用補助および位置計測を行う。ASVには音響モデム、音響測位装置、通信装置、GPS、AUVの展開・回収装置が搭載されている。

|

|
AE2000aで得られた結果。海底地形図と音響画像が得られる |
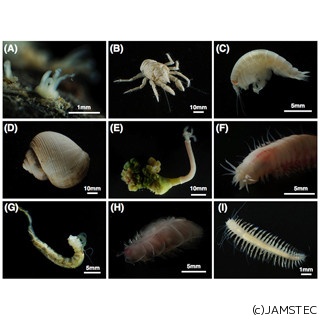
AE2000fの「SeaXerocks」による画像マッピングの結果例。ベニズワイガニの足まで鮮明に写っている |

|

|
AE2000fで得られた3Dの海底画像 |
ASVでAUVの位置計測や通信を行い、AUVの運用を補助する |
Team KUROSHIOは今後、Round1突破に向けて機器の運用技術や信頼性を向上するための要素技術開発などを行っていくという。またRound1までで約8000万円、Round2で2億円以上の予算が必要となるため、資金調達も大きな課題となる。中谷氏は、「AUV・ASVを使ったこのような大会が行われるのはなかなかないチャンス。機会に恵まれたうえに、優秀な仲間がこれだけ揃っているので、ぜひ結果を残したい」とコメントしている。