会場展示その1 - ネギを使ったリアルタイム処理のデモ
さて、ブースでの展示を全部紹介するにはあまりに展示内容が多すぎるので、3点ほどに絞ってご紹介したい。まずはRZ/T1であるが、先ほどの工場デモの脇でネギを動かすデモが行われていた(Photo31)。

|
|
Photo31:ボードそのものはRZ/T1のモータソリューションボードで、これでモータを駆動し、ネギを左右に移動させているだけ |
Photo16にも出てきたが、RZ/T1は600MHz駆動のCortex-R4FとR-IN32M3を組み合わせたマルチコア版の他に、R-INエンジンを持たないCortex-R4Fだけのものもあり、ここでデモしているのはCortex-R4Fのみの方である。このRZ/T1の特徴は512KBのTCMを持っており、ここにリアルタイム動作が必要な処理ルーチンを格納することでLatency 0でアクセスできる点だ。
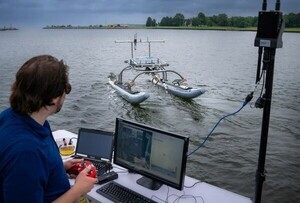
デモそのものは、ネギの傾きを検知し、倒れないようにする(左に倒れそうなら左に加速度を掛けることで倒れこみを防止する)だけのものだが、これがTCMの有無で大きく変わってくる。Movie01を見ていただくと判るが、奥にあるネギはTCMを使わずに動かしており、手前のネギがTCMを使った場合だ。奥の方は頻繁に左右にふれているのは、「倒れこみを検知→反対方向に動かして逆方向の加速度を掛け、倒れこみを防止」というループを必ずしも一定周期で実行できず(これはキャッシュミスなどにより、処理ルーチンの起動に時間が掛かる場合があるため)、結果として倒れこみの変位が大きくなるため煩雑に左右に動くことになる。対してTCMを使うと、確実に短い周期でフィードバックループを廻せるので、倒れこみ変位が少ないうちに反対方向に動かすことができ、結果として極めて安定して見える。
| 動画 | ||
|---|---|---|
 |
||
|
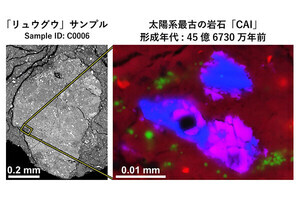
次がRZ/A1。画像認識のデモであるが、回転寿司を模したラインに流れるネタを即時に判別する(Photo32)、という「凄いんだけど何故寿司?」という、ネギに通じるものがある内容だった。先ほどのステージでは、お父さんの顔認識に活躍していた(Photo33)。

|

|
|
Photo32:認識は若干Latencyは大きい感じだったがスループットは十分高速で、寿司だけでなく「寿司と寿司の間の隙間」まできちんと認識していた |
Photo33:このリファレンスボードで認識。軍艦巻きと並んでるところがシュール |
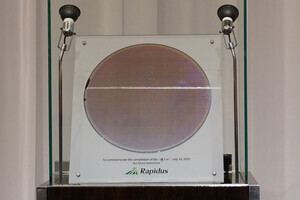
最後がRZ/G1(Photo34)で、先ほどのデモではマイクロサーバの実装に使われていたが、HTML5ベースのUIを持つサーバ、あるいはMedia Centerといったものが1チップで構成できる点が大きな特徴となっている。今回は液晶モニターとHDMIで接続しているが、Photo34の基板構成を見れば、これを小型化して液晶モニターに内蔵するのも容易いだろう。同社の中では珍しく(?)本当に汎用で、産業用から民生用・自動車の低価格インフォテイメント向けあたりまで幅広く使える事になるだろう。

|

|
|
Photo34:ヒートシンクが載っているあたりは、恐らく1.5GHz Dual Cortex-A15構成のRZ/G1Mを搭載したリファレンスボードと思われる |
Photo35:RZ/A1は1MBのフレームバッファを持ち、WXGAサイズまで外部SDRAM無しで画面表示が可能だが、昨今のモニターはフルHD表示が当たり前になってきており、DDR3×2が外付けにあるのは仕方ないところか。とはいえ、USB 2.0/3.0のPHYまで内蔵しており、外部部品は本当に最小 |