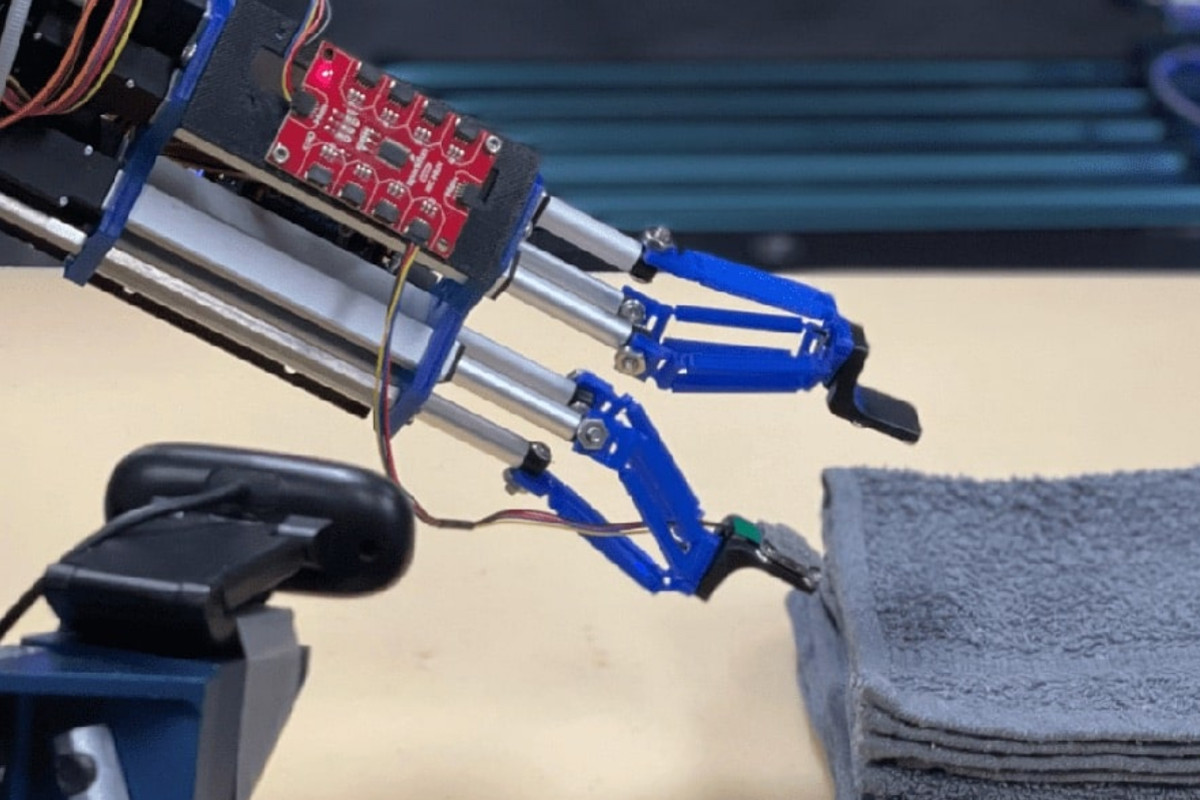
カメラ情報に基づき、ロボットアームはマジックテープの両端を掴む(A.1、B.1)。触覚情報によりテープの向きを感知し、フック面がループ面と合うように姿勢と角度を調整して位置合わせを行う(A.2、B.2)。マジックテープを固定し、右アームが押し付けて確実に結合させる(A.3、B.3)。与えられたテープの面に適応して、適切な接触面となるよう異なるテープ操作運動が自動生成される
(出所:東北大ニュースリリースPDF)
![]() 次世代「プロトン電池」向け陽極の開発成功 LIBに代わる電池実現へ前進
次世代「プロトン電池」向け陽極の開発成功 LIBに代わる電池実現へ前進

![]() ローム製品がネットで買える公式直販「ROHM Online Store」 約2万種類を用意
ローム製品がネットで買える公式直販「ROHM Online Store」 約2万種類を用意

![]() GSユアサの新世代「宇宙用リチウムイオン電池」開発、JAXA基金に採択
GSユアサの新世代「宇宙用リチウムイオン電池」開発、JAXA基金に採択

![]() トランプ政権のAI推進政策、その戦略的意図と地政学的背景を読み解く
トランプ政権のAI推進政策、その戦略的意図と地政学的背景を読み解く
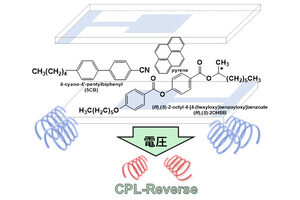
![]() 近畿⼤ら、液晶画面を高機能化する新成果 円偏光の発生・回転方向の高速切替に成功
近畿⼤ら、液晶画面を高機能化する新成果 円偏光の発生・回転方向の高速切替に成功
電子機器、いわゆる組み込みシステムや、センサやデバイスとインターネットを接続することで、社会の在り方そのものを変革させると言われるIoTに関する情報やセキュリティなどのトレンド、ホットなニュースを毎日更新。特にIoTに関しては、IIoTを中心に、さまざまな活用事例などを交えて紹介します。