西暦2050年までに、サッカーの世界チャンピオンチームに勝てる、自律移動のヒューマノイドロボットのチームを作る……この壮大な目標を掲げる自律移動型ロボット同士の競技会「ロボカップ」を創設したメンバーの一人が、大阪国際工科専門職大学 副学長と大阪大学大学院 特任教授の肩書きを持つ浅田 稔氏だ。
2022年5月に開催されたアヴネット株式会社のオンラインイベント「Avnet Tech Days 2022」にも基調講演者として登壇した浅田氏に、ロボット研究及びロボカップに携わるようになったきっかけ、ロボカップが生み出した技術と課題、そしてロボットと人間の未来について話を伺った。
-

大阪国際工科専門職大学 副学長
大阪大学大学院先導的学際研究機構共生知能システムセンター 特任教授
浅田 稔 氏
(Photograph by Yasuyuki Takagi T JAPAN 2022年6月1日号。写真は、科学未来館の特別展『きみとロボット』での撮影)

――はじめに、ロボットに関わるようになった経緯を教えてください。
大学時代(大阪大学基礎工学部)の卒業研究は画像認識がテーマでした。機械は人から「リンゴとは赤くて丸いもの」というモデルを与えられ、赤くて丸いものを「リンゴ」と捉える、要するに機械自身が認識しているわけではないとそのとき学びました。機械が自分の体でもってモデルを作るプロセスを経験し、かつモデルの有効性を検証をしなければ認識できるようにはならないと考え、体を持った機械、つまりロボットの世界に入ってきました。
いわゆる機械学習には、大きく3つの方法があります。1つ目は教師あり学習、2つ目は教師なし学習、そして3つ目が、教師は機械の行動に対する評価のみを与え、機械は評価が高くなる行動を選ぶように学習していくという強化学習です。私は1990年代前半、強化学習をロボットに応用しようと考え、ロボットでサッカー競技を行う研究をスタートしました。
――それがロボカップにつながっていくのですね。
当時、のちに一緒にロボカップを設立することとなった研究者が「国際人工知能会議でロボットの競技会があるが、10cm歩いて止まり、10分ほど考え、また10cm歩いては止まるのでつまらない。せっかくならもっとワクワクすることはできないか」と言っていたんです。そこで私が研究していたサッカー競技はどうでしょうと提案して意気投合し、ロボカップを設立しました。1997年に国際人工知能会議が名古屋で開かれることが決まっていたので、そのタイミングにお披露目しようということで、1997年の第1回大会「RoboCup 97 Nagoya」開催にこぎつけたのです。
ロボカップの種目には、車両型ロボットで対戦するリーグをはじめさまざまなものがあります。2002年には本格的なヒューマノイド(人型ロボット)で戦うリーグも始まりました。人間のチャンピオンチームに勝つという最終目標の達成のみを目指しているのではなく、その過程で生まれた技術を世の中に出し、産業界で応用していくことも大きなミッションになっています。
ロボカップ立ち上げと並行し、私個人としては、ロボットの知能にも関わる認知発達ロボティクスの研究も進めています。ロボットが人間に勝つには知能が必要です。よく「ロボットに人工知能をつける」という言い方をされますが、私はこれに大反対。ロボットに知能をつけるのではなく、知能そのものがロボットから生まれるんだと主張しています。要するに、ロボットに体があることで、そこから知能が創発するということです。私は、まさに知能自体が生まれ、発達していく過程を研究するものとして、認知発達ロボティクスという研究分野を立ち上げました。
――ロボカップ創設から現在まで、技術の進み具合はいかがでしょうか。
ロボカップ以前、ロボット研究は「自分の研究室で動かしておしまい」でした。一般的な科学技術論文で、再現テストを行ったところ、論文の8割は再現できないとの結果が科学雑誌に載ったこともあります。しかしロボット開発の最終目標は社会応用ですから、どこでも動かなければ話にならないということで、オープンな場で実施するロボカップの意義が注目されました。
とはいえ、1997年の第1回大会はひどいもので、まともに動くロボットが少なく、動いたと思ったら壁にぶつかり、違う方向へ行ってしまう状況でした。ですが、以降は参加チームが増え、それとともに技術もどんどん上がっていきました。とくに、実際のロボットを使わず人工知能の選手同士が戦うシミュレーションリーグでは、技術がみるみる向上していったのです。
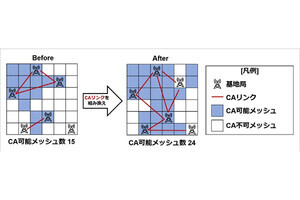
ハードウェアのほうはそこまで急激な進化はなかったものの、当初はとろとろと動くだけだったのが、毎年新しい技術が導入され、カメラの画像認識や各種センシングデバイスも発展したことから、動きは格段に速く、かつ精度も高くなっています。たとえば車輪で移動するロボットのリーグでは、頭の上に全方位カメラ、足回りには車輪にスライド機能を加えた全方位移動機構を備え付け、きわめて自由度の高い動きが可能になっています。足回り以外でも、キックが発達しています。そもそもキックは蹴るというよりただぶつけてボールを動かすだけのものだったのが、今はサイドキック、バックスピンなど多彩なキックが実現しています。



※スライドは、一般社団法人次世代ロボットエンジニア支援機構(Scramble)のSSLチームから許可を頂いて掲載しています。
ヒューマノイドの部門では、車輪ではなく、膝や足首の精緻な動きを再現するために多様なメカが使われています。参加者には人工知能研究者が多く、メカに弱かったため、当初は一般商品を利用していましたが、それでは間に合わないということで、いまは各チームが自製しています。3Dプリンターを活用できるようになり、自家製パーツの品質もさらに高まっています。
――ここまでのところで、ロボカップに関連して生まれた技術で実際に産業応用が進んだものはありますか。
代表的なものが、移動ロボット技術を利用し、人が倉庫の棚に赴くのではなく、棚のほうから動いてくる仕組みを実現した自動倉庫搬送システムです。
ほかにもいろいろと応用可能な技術は登場していますが、ハードウェアに関していうとテクノロジーの進展はまだまだ必要です。実は、ヒューマノイドは現状でキックやターンはできるものの、まだ歩くだけで、走ることができません。4足ロボットには走れるものもあるのですが、2足ロボットでは大きなチャレンジです。ジャンプやヘディングもまだまだ。ジャンプについては空気圧アクチュエーターを使った試行錯誤が始まっていますが、制御が難しく、課題は残っています。この辺りはまさに今後のハードウェアにおける革命が必須で、デバイスメーカーやエレクトロニクス企業に期待したいところです。困難なことではありますが、でもだからこそ、チャレンジしていただきたいですね。
――ロボカップの近年の状況を見て、今後ロボットはどう発展していくのか、考えを伺えますか。
ロボカップには、サッカーで生まれた技術を家庭に応用するロボカップ@ホームという競技があります。いわゆる日常生活支援ロボットの位置づけです。いま高齢者の孤独が社会的課題となっていますが、ロボカップ@ホームでこうした喫緊のニーズに対応できるロボットの進化が進むのではないでしょうか。
より長期的な目線でいうと、人間とロボットはこれからマージ(融合)していくと考えています。たとえば視覚障害者の視覚など人間の機能がロボットでリプレースされるようになるだけでなく、健常者が持つ能力より優れた機能も実現可能になるでしょう。
すると、そこで改めて「人間とは何だろう」という根本的な問題がクローズアップされるのではないでしょうか。倫理や価値観の問題が出てきますし、ロボットが自然にいる社会において人はどう生きていくか、ロボットとの共生・協働も課題となってくるでしょう。
これらはロボットがどうこうという以前に、そもそも人間同士の社会の中で考えなければならないシリアスな問題です。つまりロボットを考えるということは、ハードウェアの面でも、知能や心の面でも、まさに人間自体を考えることこそが最大のテーマなのです。
そして、いま話したような未来に近づけるためにも、ハードウェアメーカーの力が必要です。ですからハードウェアメーカーのみなさんには、ぜひロボカップの現場に来て、デバイスがどのように使われているか、どのようなデバイスが求められているかを、肌で実感していただけたらと願っています。
――最後に、浅田さんにとってロボットとはどのような存在でしょうか?
私は、ロボットは人間を映す鏡であると以前から言い続けています。ロボットとはまさしく人間であり、認知発達ロボティクスの根源も人間をいかに理解するかです。今後も、ロボットとは何か、そして人間とは何かを、さらに追求していきたいですね。
[PR]提供:アヴネット