早稲田大学(早大)は10月16日、次世代コンピューティングの1つであるアニーリング方式に属する、富士通の量子インスパイアード技術「デジタルアニーラ」を用いて、ロボットの構造に応じたエネルギー消費の少ない運動を高速で計算する手法を提案したことを発表した。
同成果は、早大 理工学術院 総合研究所の大谷拓也次席研究員、同・大学 理工学術院の高西淳夫教授らの共同研究チームによるもの。詳細は、IEEEが関心を寄せるすべての分野を扱う学際的なオープンアクセスジャーナル「IEEE Access」に掲載された。
-
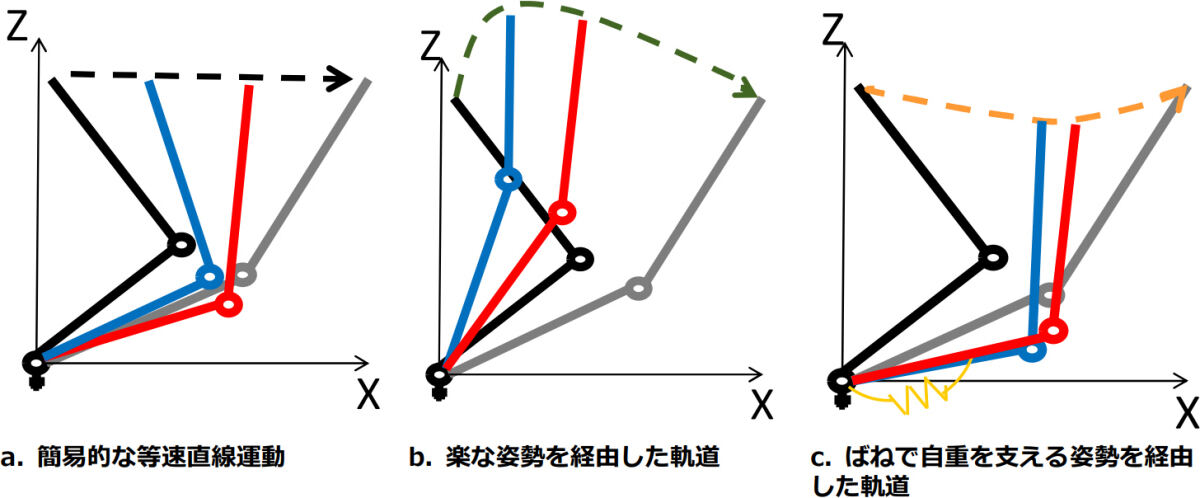
今回提案された手法により最適化されたロボットの運動イメージ(出所:早大Webサイト)

ヒトもロボットも、どのように動くかでエネルギー消費は変わる。ロボットも自分でエネルギー消費の少ない運動を見つけることができれば、同じ作業をするにしても運動時のエネルギー消費を低減することが可能だ。しかし、腕や脚に複数の関節がある場合、運動に関する計算は複雑で、膨大な時間が必要であるほか、ロボットの動く軌道と、その軌道を実現する際の各時間の加減速を同時に考慮することは困難だったとする。
そこで研究チームは今回、富士通のデジタルアニーラを用いて、ロボットの構造に応じたエネルギー消費の少ない運動を高速で計算する手法を提案することにしたという。
提案された運動生成手法は、従来法よりもはるかに高速に、ロボットの可動範囲全体を考慮したエネルギー消費の少ない運動を生成できることが確認された。ある運動では、旧来法では計算に440秒かかっていたところを100秒で完了し、4倍以上の圧倒的な高速性を示すことができたとする。
また、ロボットアームを前に伸ばす動作や、腕を上げる動作をシミュレーションし、ロボットの各部の重さや長さ、ばねの有無などを考慮してエネルギー消費を計算することで、腕を伸ばす際に短い状態で待機してから伸ばす動作や、腕を上げる際に真上にゆっくり上げてから少し前に出すような動作が生成されたという。さらに、ロボット内にバネがある場合には、ばねが支えられる範囲で腕の重さを支えてもらえる位置に腕を移動させた後、目標に到達する運動が生成されたとした。これらによって、一般的な比較対象として用意した、運動の開始地点から終了地点までの等速直線軌道を通った場合に対して、関節に必要な力の合計が約10%減少でき、エネルギー消費量を減らすことができたとする。
-
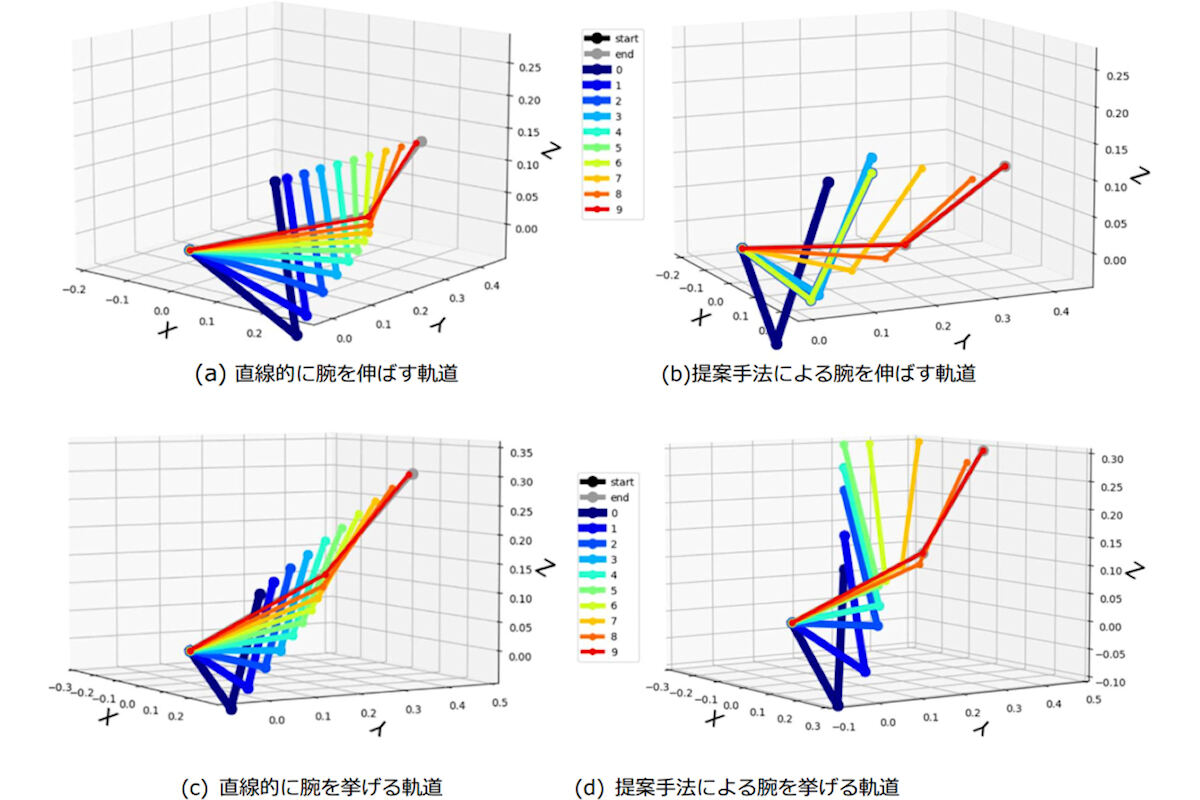
シミュレーションによる直線軌道と、今回の提案手法による軌道の変化の比較(出所:早大Webサイト)

今回の研究が解くロボットの運動生成問題は、ロボットの運動時のエネルギー消費を最小化する、離散化された一連のロボットアームの手の位置を求める最適制御問題として定式化されるものだ。今回提案された運動計画法は、主に以下の5つのステップで構成される。
- ロボットの手の可動範囲を離散化する
- 離散化された手の位置とそれらの組合せにおける各関節角度、角速度、角加速度を計算する
- 実行する作業に応じて目的関数と制約条件を設定する
- コスト最小化問題を二次制約なし二値最適化(QUBO)に変換する
- イジングマシンによる最適化計算を行う
従来のロボットの運動方程式を構築し連続最適化問題として解く手法は、ロボットのダイナミクスが複雑であると運動方程式も複雑になり、数学的に解くことが困難になることが大きな課題だった。
そこで、ロボットの手の位置の時間変化が軌道であるとして連続的な軌道を各瞬間の手の位置の組み合わせと考え、各瞬間にどの手の位置にあるかを組合せ最適化計算によって求める。ロボットが消費するエネルギーはある時刻に手先位置がどのように変化したかによって計算できるため、離散化した手の位置の中から、手の位置同士の組合せごとに必要なエネルギーを計算し、ロボットのエネルギー消費ライブラリを作成。そのデータから、各時刻の手先位置変化に必要なエネルギーの運動開始から終了までの合計が最小となる手の位置の一連の組み合せを求めるという内容である。
-
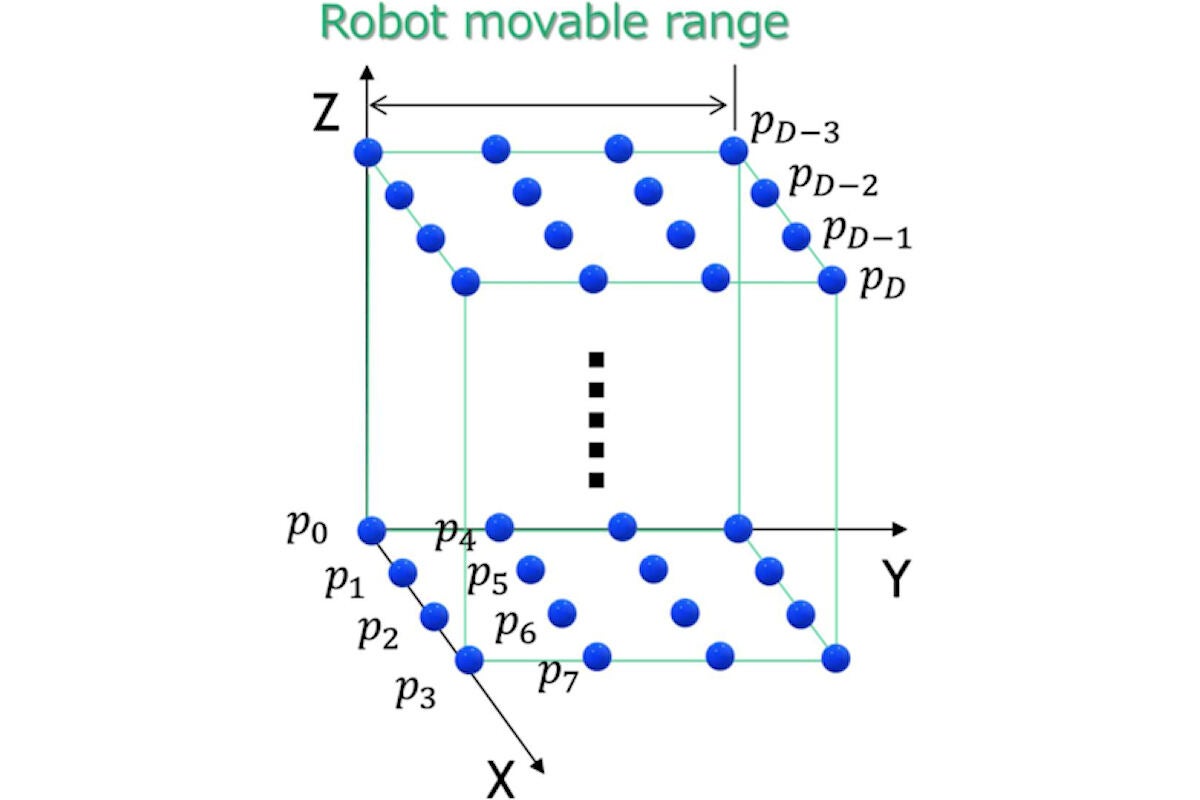
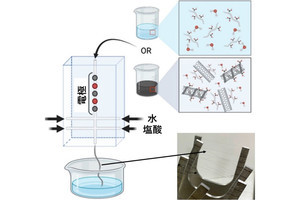
ロボットの運動可能範囲の離散化イメージ(出所:早大Webサイト)

なお今回の技術は、ロボットアームを備えるロボットであれば汎用的に利用でき、複数のロボットアームに対して、それぞれに異なる運動を生成することも可能とした。
また現状の課題として、より関節数の多いロボットの運動生成を行うには、長い時間が必要となる。そのため、最適化を行う範囲を段階的に設定して最適化するなどによって、さらに大規模な運動生成を高速に計算する手法が求められるという。今後は、ロボットでのさまざまな運動生成の実証を進めると共に、ロボットの大きさや重さだけでなく、各部の構造の違いとしてギヤの違いなどをさらに考慮していくことを目指すとした。
さらに、今回の技術を用いることで、同じバッテリーを搭載していてもロボットの稼働時間を延ばせるようになり、屋外環境、さらには宇宙など、エネルギー容量が限られる場でのロボットの活躍に貢献できることが期待されるとした。