大阪大学(阪大)は4月23日、ネコなど、動物の神経および筋肉の特性を再現可能な四脚ロボットを開発したことを発表した。
-
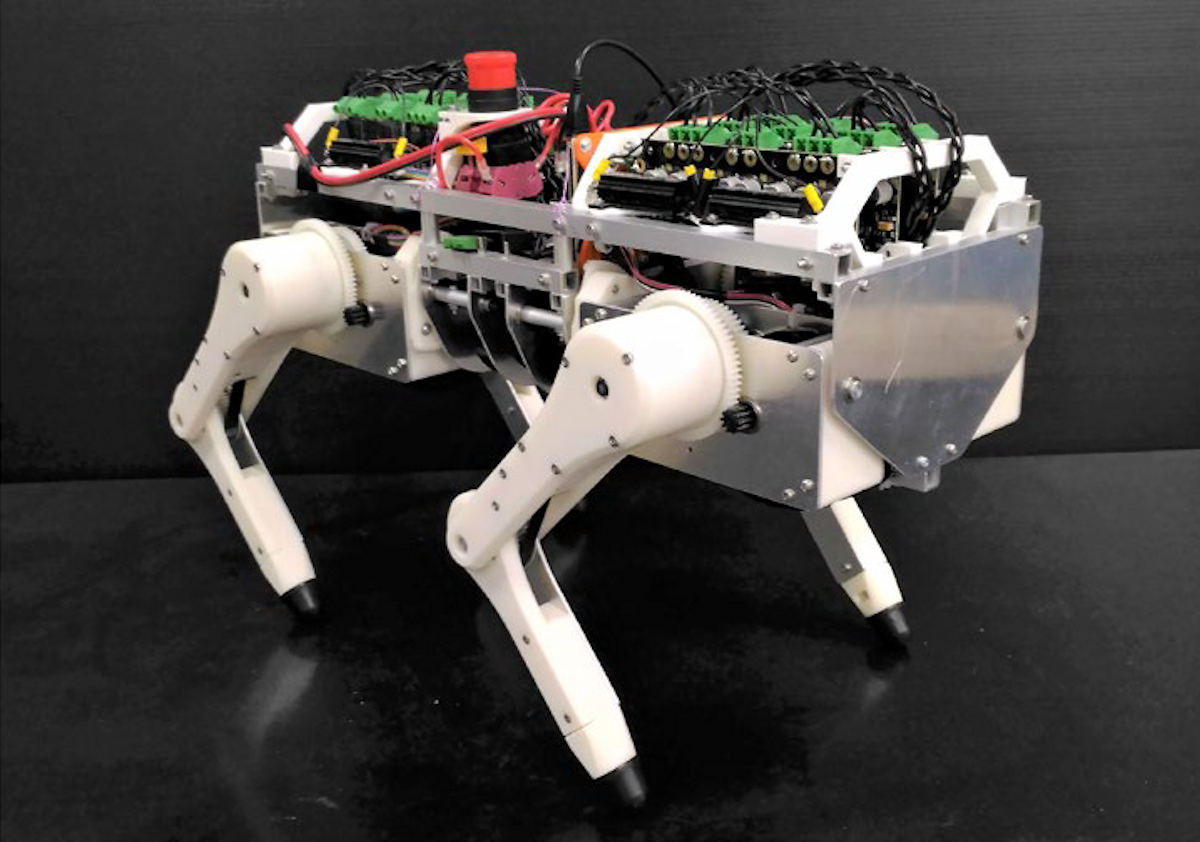
動物の神経・筋特性を再現可能な四脚ロボット (出所:阪大Webサイト)

同成果は、阪大 大学院工学研究科の谷川豊章大学院生(当時)、同・増田容一助教、同・石川将人教授らの研究チームによるもの。詳細は、自律システムを題材にしたオンライン論文誌「Frontiers in Neurorobotics」に掲載された。
動物の歩行運動は、脳や脊髄内の複雑な神経回路によって生み出されると考えられてきた。しかし近年になり、シンプルな反射回路のみによって安定した歩行のリズムや足並みを生み出せることが報告され、四脚動物が効率的かつ安定して歩行する仕組みの解明が期待されるようになってきた。
中でも、20世紀後半に行われた実験から、ネコの歩行に関わるいくつかの神経機構が発見され、シミュレーションやロボットによる再現が試みられてきた。しかし、当時の実験内容は、現在の動物愛護の観点に照らし合わせると難しい内容であり、同様の実験を行うことはもはや不可能となっており、動物の身体の仕組みに関する研究がなかなか進展しにくい状況となっており、当時発見された複数の神経機構が、ネコの身体の中でどのように統合されているのか、すなわち歩行を司る反射回路がどのように配線されているのかという点は、未だによくわかっていなかったという。
そこで研究チームは今回、動物の代わりにかつての実験内容が行えるような、動物の神経および筋肉の特性を再現することが可能な四脚ロボットを開発したという。四脚ロボットには柔らかさと力強さを兼ね備えた低減速比のモータが搭載され、コンピュータがシミュレーションした筋肉の特性を物理的に四脚ロボット上で再現することができるようになっており、これを使えば、動物には行えないような実験も行えるようになるとしている。
実際に、四脚ロボットの歩行実験から、安定な歩行を生み出す反射回路の探索を行った結果、「腰と膝の伸筋間の相互興奮性回路」というきわめてシンプルな構造を持つ反射回路が発見されたという。発見された回路をそれぞれの脚に再現するだけで、安定した歩行運動が可能になることが確認されたとする。
さらに、発見された相互興奮性回路を切断するという、ロボットだからこそ可能な実験を行った結果、歩行リズムが不規則になることも確認したほか、20世紀後半に行われた実験と同じ条件となるように、相互興奮性回路を電気的に刺激したところ、ネコと同様の「支持脚期延長現象」が観察されたともしており、この結果から、相互興奮性回路が、ネコの歩行を司る重要な回路であることが示唆されたとしている。
実験動物の代わりに、今回のようにロボットを用いることで動物を理解するという手法は、研究領域として「Robotics-inspired Biology」(ロボット規範生物学)と呼ばれている。動物の神経や筋肉を再現して理解する研究は、ネコの後ろ足のシミュレーションや、二脚の跳躍ロボットなどがすでに提案されているという。
このような手法は、生物学に新しい知見をもたらすのはもちろんのこと、今後、実験動物の代わりとなるロボットが増えていけば、より多くの研究者が幅広い実験条件下で動物の仕組みを調査できるようになるだろうと研究チームでは説明する。
またロボット工学の視点から見ると、ロボットを動物の構造に近づけることは、「Biology-inspired Robotics(生物規範ロボティクス)」と呼ばれる研究領域に貢献する可能性もあるという。動物のように効率的かつしなやかに動き回るロボットを実現するための基盤技術となることが期待できるためで、今回の成果は、そうした生物学とロボット工学の両分野に貢献することが期待されるとしている。
さらに、学術的な成果に加え、近年はペット産業が拡大傾向にあり、パートナーとなる動物たちの知見を得やすくすることは、愛猫家など、ペットと共生する社会においても意義のある成果だといえると研究チームでは説明している。
四脚ロボットが歩行する実験の様子などが収録されている