北海道大学、北海道岩見沢市、日本電信電話(NTT)、東日本電信電話(NTT東日本)、NTTドコモの5者は11月16日、最先端のロボット農業技術に、第5世代移動通信方式(5G)や、革新的ネットワーク技術である「IOWN」を実現する技術の1つである複数ネットワーク最適活用技術や高精度な測位技術などを用いて、農機完全自動走行に向けて通信や映像の途切れを防止するなど、安定的で円滑な農機の広域自動走行とその遠隔監視制御を実現したと発表した。
-

実証の概要

今回の実証では、協調型インフラ基盤技術、ネットワーク協調デバイス制御技術、データストリームアシスト技術及び推論処理基盤技術、「docomo IoT高精度GNSS位置情報サービス」、クラウドGNSS測位技術の5点について、有効性を確認した。
-

複数ネットワークを跨る農機自動走行

協調型インフラ基盤技術については、マルチ無線品質予測技術(Cradio)及びE2Eオーバレイネットワーク技術を用いて、複数のネットワークを跨って農機が自動走行する中で、通信品質の変動をAI(人工知能)が予測して通信品質が劣化する前に適切なネットワークに自動で切り替えることで、遠隔監視を中断させない安定的な自動走行を実現したとしている。
-

ネットワーク系技術を使用した実証

ネットワーク協調デバイス制御技術に関しては、ネットワークの品質変化に応じた農機の制御指示を実現し、監視映像が伝送できないレベルにネットワーク品質が劣化した際に自動でトラクタを安全に停止させるなど、その有効性を確認した。
データストリームアシスト技術では、監視拠点で映像をパケットレベルで低遅延に複製することで、ネットワーク負荷を低減しながら遠隔監視と画像解析などの複数の用途でのリアルタイム映像の同時利用を可能にした。
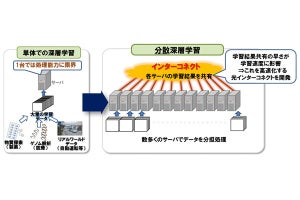
また推論処理基盤技術では、深層学習(ディープラーニング)においてサーバ収容率を高めるために複数の映像ストリームを効率的に処理するストリームマージ機能やCPUやGPUなど多様なリソースを最適化して処理を効率化したという。これらにより監視者の負担軽減につながる効率的な遠隔監視を実現し、その有効性を確認したとしている。
-

クラウドGNSS測位技術を使用した実証

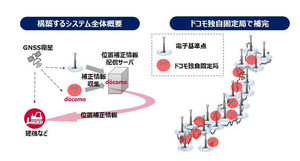
docomo IoT高精度GNSS位置情報サービスは農家による固定局の設置が不要といい、これを使用した農機自動走行の実証では、高精度の測位を実現し有効性を確認した。これにより、低コストで高精度な測位情報の利用が可能になるとのこと。
クラウドGNSS測位技術を使用する農機の自動走行の実証では、農機に搭載した受信機で受信したGNSS信号と固定局からの位置補正情報を使用して、クラウド上で測位演算処理を行い、リアルタイムの測位結果を農機の自動走行の制御に使用することで、その有効性を確認した。
-

.路面画像による位置推定

今後は、農機自動走行の安全性をさらに高めるため、衛星信号を用いた測位可能なエリア圏外でも農機自動走行を可能にするという、路面画像認識による測位補完技術の実証も行う方針だ。また、ドローンや草刈・収穫ロボットなど農機以外への遠隔監視制御対象の拡大や、5Gや現行光ネットワークよりもさらに高速・大容量・低遅延なIOWN関連技術の導入を通じた、より多数の農機の遠隔監視制御、より広域での農業の自動化を目指すとしている。
さらには、農業の生産分野にとどまらず、流通・販売・消費分野にまたがるフードバリューチェーンへと取り組みを拡大させると共に、そこで構築した通信インフラを防災や健康など他分野での利用に広げるなど、スマート農業を軸とした、生活に必要な多様なサービスのスマート化へとつながるスマートアグリシティの実現を目指すという。
これらに加え、産官学連携のメンバーが主体となり、新たにクボタや日立ソリューションズ、スマートリンク北海道なども加わったコンソーシアムを組成し、総務省の「地域課題解決型ローカル5G等の実現に向けた開発実証等」、農林水産省の「スマート農業実証プロジェクト(ローカル5G)」事業も進めることで取り組みを融合・深化させ、農業分野の課題解決、競争力強化に貢献していくとしている。