大阪市立大学は、特別な技量がなくても簡単に操縦できるケーブル給電マルチコプターの操縦アシスト機能を開発したと発表した。
同成果は、大阪市立大学工学研究科機械物理系専攻の今津篤志 講師らの研究グループによるもの。詳細は、「Journal of Robotics and Mechatronics」に掲載された。

|

|
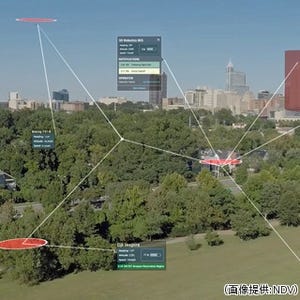
飛行実験の様子 (出所:大阪市立大学Webサイト) |
ケーブル給電マルチコプターの力のバランス (出所:大阪市立大学Webサイト) |
近年、橋梁やトンネルといったインフラの老朽化が問題となっており、点検などの目視検査の代わりにマルチコプターなどが活用されている。しかし、バッテリ容量による飛行時間の制限が問題となることも多く、地上から有線ケーブルにて給電を行うと、張力の影響から操縦者に高い技術が求められる。しかし、そのような技量を持つ人材は少なく、ケーブルから受ける影響を考えずに操縦できるマルチコプターの開発が進められていた。
今回、同研究グループは、ケーブル張力のベクトルの値を算出するために角度センサと張力センサをマルチコプターに搭載し、重力とケーブル張力の合力に釣り合ってバランスを保ちながら飛行するために必要なマルチコプターの角度と推力の大きさを求めて、自動制御の角度目標値や出力推力に組み入れた。これにより、ケーブルの張力の影響を自動で補正して、ケーブルがない状態と同様に操作することが可能となった。
同技術を用いることで、ケーブルの無い一般的なマルチコプターを操縦することができる操縦者が、特別な訓練を受けることなくケーブル給電マルチコプターを操縦することができるようになったという。また、地上局から水平に離れた地点でマルチコプターが傾いた状態でバランスするような飛行もできるようになり、現在は地上局のほぼ真上だけの飛行で運用されていることが多いケーブル給電マルチコプターの活用範囲を広げることが期待されるとのこと。
同研究グループは、同成果に対してケーブルが振動したときもある程度の抑制効果が得られているが、特定の振動周波数で不安定になる場合があり、対策を継続検討する必要があると説明した。また、今後の展望については、有線給電による大電力を活用しマルチコプターにハンマーを搭載し打音調査を行うなど、工具で作業を行う用途への展開を目指していくとしている。