東北大学は2月28日、DNAやタンパク質などの生体分子からなる分子機械を人工細胞膜内に統合し、変形機構を制御する「アメーバ型分子ロボット」を開発したと発表した。
同成果は、東北大学大学院工学研究科の大学院生 佐藤佑介氏、野村 M. 慎一郎准教授らの研究グループによるもので、3月1日付けの米国科学誌「Science Robotics」に掲載された。
近年、化学や合成生物学の分野において、生体分子を材料として用い、センサやプロセッサ、アクチュエータと呼ばれるさまざまな分子機械をつくる要素技術が確立しつつある。同研究グループらが所属する日本の分子ロボティクス研究会は、これらの分子機械を一連のシステムとして統合する「分子ロボット」という概念を提唱し、その実現を目指しているという。
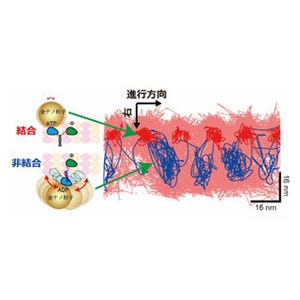
今回、同研究グループが開発したアメーバ型分子ロボットは、信号分子に応じて変形機能を制御するもので、大きさは数十μm。人工細胞膜の内部に統合されたキネシンと微小管で構成される「分子アクチュエータ」と、DNAで作製した「分子クラッチ」で構成されており、分子クラッチが分子アクチュエータからの力の伝達を切り替えることで変形が制御される。
同ロボットの内部には光応答性のDNA信号が組み込まれており、光の照射をきっかけに命令がロボット内部に入力されることで、変形の開始・停止をコントロールできる。また同ロボットは冷凍輸送することが可能で、受け取ったほかの研究室で解凍して再起動することもできるという。
同分子ロボットについて同研究グループは、まだプロトタイプの段階であるとしているが、これをプラットフォームとしてさまざまな分子機械を組み込むことで、より高度な機能を持った分子ロボットの開発が加速されてゆくものとコメントしている。

|
アメーバ型分子ロボットの模式図。ロボット内部で分子アクチュエータがはたらき、ボディである人工細胞膜が変形をつづける。DNA信号が入力されると、アクチュエータとボディをつなぐ「分子クラッチ」がはたらき、状態がスイッチされる (出所:東北大学Webサイト) |