民間月面探査チーム「ハクト」は8月29日、2017年に打ち上げるローバーのデザインが決定したことを発表、都内で開催した記者発表会にて披露した。重さがわずか4kgという、超軽量の4輪型ローバー。このミッションに成功すれば、日本初の月面探査ローバーは民間の手によって実現することになる。

|

|
民間月面探査チーム「ハクト」のローバー |
ハクトの袴田武史代表(ispace代表取締役) |
ハクトは、月面レース「Google Lunar XPRIZE」(GLXP)に日本から唯一出場しているチームである。GLXPのミッションは、月面を500m走行し、映像を地球に送ること。これを最初に達成したチームには、優勝賞金として2,000万ドルが贈られる。ハクトのローバーは、このGLXPに出場するために開発したものだ。

|

|
GLXPのミッション。走るだけでなく、映像も送る必要がある |
世界から16チームが参戦している。日本からはハクトだけだ |
ハクトは2010年に活動を開始。当初は日欧の混成チームで、欧州側がランダー、日本側がローバーを開発する計画だった。ところが、2012年に欧州側が離脱。チームは存続の危機に立たされたが、ここで「他チームのランダーに相乗りする」ことを決断。活動を継続し、2015年、相乗り先を米Astroboticに決めたことを明らかにしていた。
ここで大きな問題となるのは相乗りの費用だ。Astroboticは月面までの輸送費用として、1kgあたり120万ドル(約1.2億円)という価格を提示している。この資金を調達しなければ、ローバーを開発できたとしても、月に行くことはできない。ミッションを実現するためには、ローバーを軽量化し、コストを削減することが至上命題だった。
ハクトチームには、資金を調達するビジネス側のグループと、ローバーを開発するエンジニア側のグループがある。ビジネス側としては、とにかく1gでも軽くして、コストを下げたい。しかしエンジニア側は、高性能なローバーを作るために、重量が欲しい。ハクトのローバー開発は、その相反する要求をうまく満たす必要があった。

|

|
ビジネス側とエンジニア側の相反する要求でせめぎ合いがあった |
4kgの4輪型ローバーは、コストパフォーマンスでベストな選択だという |
ハクトが最初に開発した4輪型のプロトタイプモデルの重量は10kg。これでもローバーとしては軽量なのだが、輸送費だけで10億円を超えてしまう。そこで、ハクトの袴田武史代表は、より軽くできる2輪型のローバーを推していたという。2輪型なら重さはわずか1kg。これだと輸送費を大幅に抑えられる。
しかしエンジニア側は、走行性能に優れる4輪型にこだわった。何度も議論し、時には口論にもなったそうだが、その結果「4輪型のまま重量をギリギリまで削減する」方向で決まり、今回のフライトモデルのデザインがまとまった。必要な性能は維持したまま、重さを4kgまで削減。これなら、輸送費を5億円程度にまで抑えることができる。
2015年10月に完成したプリフライトモデル3(PFM3)で、ローバーはすでに7kgまで軽量化が進んでいた。ここからさらに軽くするために、CFRP(炭素繊維強化プラスチック)の採用をいっそう進め、結果として、従来は全重量の30%がアルミだったのに対し、フライトモデルでは5%まで下がっているそうだ。

|

|
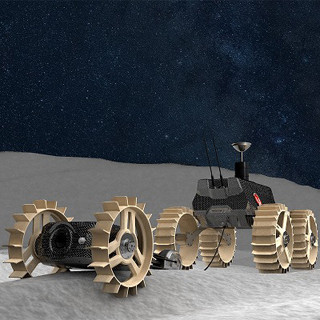
一番最初のプロトタイプモデル。上部に全方位カメラが搭載されていた |
エンジニアリングモデル(EM)。このときに2輪型ローバーも登場した |

|

|
プリフライトモデル2(PFM2)。外装はCFRP、車輪はウルテム樹脂だ |
プリフライトモデル3(PFM3)。表面を銀テフロンでコーティング |
また月面では、高熱が大きな問題となる。ハクトの着陸予定地の温度は最高100℃にも達すると見られている。ハクトのローバーは、外部からの熱の流入を抑えるために、表面を銀テフロンでコーティング。鏡のように太陽光を反射しつつ、内部の熱を赤外線で放出する。ローバーが銀色なのはこのためだ。
フライトモデルでは熱対策をさらに進めた。熱に弱い電子機器の配置をトップパネル側に変更。地表からの熱に炙られる底面からなるべく離すと同時に、トップパネル自体をウルテム樹脂で断熱、太陽電池のせいで熱くなるサイドパネルから熱が伝わることを抑えた。こうした対策により、電子機器の場所は60℃以下に保つことが可能だという。

|

|
側面は熱くなるが、断熱されているので上面にはあまり伝わらない |
電子機器の放熱板は、軽量化のためにマグネシウムを採用している |
袴田代表は「宇宙開発は"夢"の代名詞になってしまっていて、自分とは関係ないと考えている人も多いが、我々はそれを現実にしようと、チャレンジしながら一歩ずつ月面に近づいている」とコメント。「我々は宇宙を選んだが、世の中には多くのチャレンジすべきフィールドがある。そこにより多くの人がチャレンジして、よりより日本、よりよい世界を作っていくきっかけになれば嬉しい」と期待を述べた。
フライトモデルのデザインが決まったことで、今後は実機の製造に移り、2017年1月までに完成、同年中に打ち上げる計画だ。またローバーの製造と並行して、今年9月26日~10月1日の日程で、鳥取砂丘においてフィールド走行試験も行う予定。ここで、走行性能、通信機能、撮影機能などを確認するほか、遠隔操作の検証も実施するとのことだ。

|

|
今後のスケジュール。打ち上げ日はまだ決まっていない |
鳥取砂丘で走行試験を実施する。機体はPFMを使うという |

|

|
発表会には、KDDIを始めとするパートナー企業も集まった |
アンバサダーの篠原ともえさん、神田沙也加さん、山口一郎さん |
ローバー写真集

|

|

|

|

|

|

|

|