岡山大学はこのほど、さまざまな衣服の箱詰め作業を行うロボットを開発したと発表した。同成果は同大大学院自然科学研究科(工)の見浪護 教授、ティーツーケー、SECの共同研究によるもの。
ロボットが動作可能となるには、周囲の動作環境および光環境が時間的に変化しないこと、ハンドリング対象物は同一形状でその形状を事前に確定できること、対象物形状に基づいてロボットハンドの設計を確定できること、などの条件を満たす必要がある。そのため、これらの条件を満たす工場で主に活用されているが、通信販売衣服の在庫管理や発送作業における衣服のハンドリングでは、不定形でさまざまな衣服を同時に取扱うため、対象物をコンピュータ内にあらかじめ定義しておくことが難しかった。一方、視覚情報によるロボット制御技術は実用化が進んでいるが、不定形単品対象物の3次元空間高精度認識や環境変化に応じた自律的対応は進んでいないという課題があった。
今回開発したロボットは、複眼カメラによる立体対象物認識システム「3D-MoS」を改良した「写真モデル3D-MoS」技術を搭載。同技術は、写真で取り込んだ情報から対象物の認識判定基準を、ロボット自身が自動作成し、作業する対象物を規定することができることが特徴。これにより、衣服の認識と3次元位置・姿勢計測技術に基づく、ハンドリングが可能となっている。
同研究グループは、「写真モデル3D-MoS」技術について「屋外作業のように事前に作業対象物を規定することが難しい自然環境内でも 自律的な動作が可能となるなど、今後の知能ロボットの可能性を広げる技術です。」と説明。また、「写真モデル3D-MoS」技術を活用した同ロボットについては「これまで不可能だった複数の種類や、変形する対象物を認識する本技術を用いたロボットにより、衣服を扱う流通業界や、多品種少量生産を行っている業界での生産/流通効率化につながると期待されます。」とコメントしている。

|
|
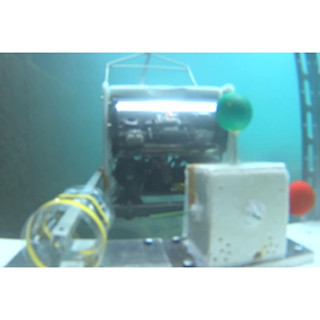
今回開発したロボットシステム(左)と実証実験で使用した衣服の例(右) |