


金環日食で全国的に盛り上がったその翌日の5月22日は、これまた朝からテレビなどの報道であるイベントのリポートで一色という状況だった。そう、東京スカイツリーのオープンである。本来なら、東京スカイツリーのオープンそのものは、サイエンスやテクノロジーとはあまり縁がないわけだが、実はそうではない。併設施設の東京ソラマチの8階に、「千葉工業大学 東京スカイツリータウンキャンパス」(タウンキャンパス)がオープンしたのだ(画像1)。
今回、タウンキャンパスを訪問すると同時に、まだ正式発表されていない千葉工大が開発した新型の原発災害対応用ロボット「Rosemary(ローズマリー)」のプロトタイプ(画像2)の取材も併せて行った。共にリポートさせていただく。

|

|
|
画像1。東京ソラマチ8階、登りエスカレーターを降りた右側にキャンパスタウンはある(入口はエスカレーター降り口の前方すぐ) |
画像2。Rosemaryのプロトタイプ。一見するとQuinceといわれてもわからないぐらい外見は似ているが、中味は別物 |
さて、タウンキャンパスの名称だけ聞くと、千葉工大生にのみ関係のある施設で、一般人には関係ないか、あったとしても生涯学習をしたい社会人のための出張教室みたいに思ってしまうかも知れない。しかし、実態はまったく異なる。
千葉工大の研究によって得られた最先端の科学技術を見て聞いて触れられる「体感アトラクションゾーン」なのだ。東京ソラマチも入場無料だが、タウンキャンパスも入場無料なので、毎日だって遊びに行けてしまうのである(筆者も自転車で30分ほどなので、週一ペースなら通える(笑))。
タウンキャンパスは、「科学技術が、人々を幸せにする社会を築くことを信じ、テクノロジーと人をつなげる場であり続けたい」という思いの元に作られた施設だ。原発災害のせいで、サイエンスやテクノロジーが負のイメージで見られてしまうことがあるが、そうではないということを証明してくれ、体感できる場なのである。
サイエンスやテクノロジーが好きな人なら、千葉工大がどんなことをしている大学・研究機関かはご存じかと思うが、ここで念のために紹介しておく。まずロボット関係で非常に有名である。
「千葉工業大学未来ロボット技術研究センター」、通称「fuRo(フューロ)」と呼ばれる研究機関(教育機関としての千葉工大の傘下にあるのではなく、経営組織の千葉工大の傘下にあり、大学とは並列の関係の研究機関)が存在し、日本のロボットテクノロジーの牽引、そして「シーズはあるけどニーズがない」などといわれる日本のロボット技術の事業化・商業展開を進展させるべく、日夜、所長の古田貴之工学博士らが奮闘している組織なのである。
古田博士といえばは、日本のロボット研究者を代表する1人で、これまで小型ヒューマノイドロボット「morph(モルフ)3」、3段階の移動モードに変形可能な8脚装備の移動ロボット「Halluc II(ハルク2)」、8脚装備のロボットカー「Hallucigenia(ハルキゲニア)01」、そして搭乗型ロボットとして開発中の世界最大級の2足歩行ロボット(の脚部のプロトタイプ)「core(コア)」などを開発してきた。
今回も多忙極める中、初日ということもあって古田博士自ら来場した一般客へのタウンキャンパスの解説を引き受け、サイエンスやテクノロジーの楽しさや可能性を伝えていた(画像3)。

|
|
画像3。オープンして最初のお客さんたち。小さくてわかりづらいが、お客さんの向こうで古田博士が説明をしている |
そしてfuRo製のロボットで一般にも知られた最も有名な1台といえば、現在は福島第一原子力発電所の事故建屋内で活躍し、唯一1階以外のフロアにも探査に入っている(つまり、急傾斜でガレキの散らばる階段を登り降りできた)日本製ロボットの「Quince」だろう。
Quinceは、fuRoの副所長である小柳栄次工学博士と、東北大の田所諭教授、国際レスキューシステム研究機構が、新エネルギー・産業技術総合開発機構(NEDO)のバックアップを受けて共同開発したロボットである。
そのQuince、本来はテロ行為を含むNBC災害向けに開発された閉鎖空間探索用ロボットとして開発されたことから、原子力発電所での事故現場(つまり、放射線量率が常時高い場所)での運用を想定していなかった。しかし、世界ナンバー1の不整地踏破能力と運動性能、操縦のしやすさなどを備えていることから東京電力に依頼され、急遽大幅な改造を小柳博士らが不眠不休で施し、無償貸与したという経緯がある。
そのため、原子力発電所内での調査を行うためのさまざまな装備を追加するにはペイロード的にあまり余裕がなかったり(本来、本体重量26~7kgのところを、もう1台分に近い重量のカメラや放射線カウンターなどの多数のオプション装備を追加して投入された)、パワーの面でも同様にかなり無理をさせていたりするのだ(一歩間違えれば即滑落という42度の急傾斜の階段を、重量が倍近く増えているのに登り降りしている)。
しかし、そんなQuinceの運用で得られた多数のノウハウを結集して、小柳博士らは昨年、原子力発電所での事故対応を最初から想定した新型機の開発を開始。それがRosemaryというわけだ。Quinceのオペレーションと平行しての作業という離れ業だったが、その新型機がいよいよ完成したのである。そんなfuRoの最新ロボットが、タウンキャンパスに入ってすぐのところで出迎えてくれるのだ(画像4)。

|
|
画像4。Rosemaryのコーナー。たぶん、ロボットならこれぐらいの階段を上れて当たり前と思うかも知れないが、そう簡単ではない。が、RosemaryやQuinceはあっさりと上ってしまうので、なおさら簡単に見える |
Rosemaryは現在、オプション装備をどうするかで東京電力がまだ検討中であることから、正式発表を待っている状態になっており、実は今回が初披露。それにもかかわらず、そんなfuRoの最新ロボットを実際に見られるだけでなく、操作までさせてもらえるというのが、このタウンキャンパスの魅力の1つなのである。
Rosemaryは、一見するとQuinceと非常に似ており、4本のフリッパーを前後左右に装備したクローラ型だ(画像5・6)。しかし、実際には一から設計されており、オプション装備なしで本体重量が約40kgと大幅増量。使用しているモータのパワーも大幅に強化し、ペイロード的にもかなり余裕を持たせているという。
対放射線性能、耐熱・耐衝撃性能がアップしたほか、Quinceでは42~3度の傾斜角度の階段を上れたけだが、Rosemaryはもはや上から見たら垂直に見えるような60度以上の登坂能力を有するに至っている。

|

|
|
画像5。2本のゴムのクローラで駆動し、前後左右にあるフリッパーによって登坂能力や不整地踏破能力が大幅に高められている |
画像6。フリッパーの1つ。Quinceよりは短い感じだ。前後1つずつ壊れても、最低限の登坂能力や不整地踏破能力を維持できる |
昨年まで行われていた移動ロボットの技術トライアル「つくばチャレンジ」にfuRoも移動ロボットを参加させていたが、そこで鍛えられた首振り型のレーザーレンジファインダ(小柳博士らが開発したfuRoオリジナルの機構)も搭載(画像7・8・動画1)。あと、今回のプロトタイプにはカメラが5基備えられていた(画像9・10)。

|

|
|
画像7。レーザーレンジファインダは首を振ることで周囲のより多くの情報を得ている。そのシステムはfuRoオリジナルの機構だ |
画像8。レーザーレンジファインダが斜めに傾いているのがよくわかるはず。なお、現在はオプション装備がシンプルだが、実際に原発に導入される際はもっと装備が増えるはず |

|

|
|||
|
|

|
|
画像10。サブカメラの1つ。同じ前方でも複数あるのは、フリッパーの動きを見やすい角度を確保してあるのと、異なる視点を用意することで、障害物など前方の状況を確認しやすくするためだ |
ちなみにRosemaryがすごいのは、単にロボットだけが開発されたわけではない点だ。操縦訓練場の構築、教育マニュアルの作成、オペレータの養成まで総括的に開発されているのである。
また、Quinceの運用で問題となっていたバッテリ交換も、プラグイン方式で充電できる仕組みとすることで解決した(画像11)。バッテリ交換に問題があると書くと、よほど手間のかかる構造になっているのかと思われるだろうが、そうではない。ネジをいくつか回してカバーを外せばすぐに交換でき、通常なら短時間で済ませられるように設計されている。

|
|
画像11。プラグインのケーブルの差し込み口。現在はピンの数が多いが、最終的には差し込みやすい2ピンのものになるという |
しかし、被爆した状態で帰ってきたQuinceのバッテリを交換するには、防護服を着込み、手も幾重にも手袋を付けた状態で作業するため、実際の現場ではネジを1つ回すだけでも大変なのだ。そんな状態でのバッテリ交換だとかなりQuinceと接していなければならないため、作業員が被爆してしまうという問題があり、それをなくせるようにしたというわけである。
前述したように、そのRosemaryを実際に操縦させてもらえることから、筆者も実際に操作させてもらった。ゲーム機PlayStationシリーズでお馴染みのタイプのゲームパッドで操作するのだが、正直な感想は驚くほど簡単だということ(画像12)。これは、Rosemaryが「誰でも簡単に操作できる」ことを目標にして開発されていることが成功しているという証だ。
しかも、Rosemary本体を直接見ながらの操作だけでなく、カメラの映像のみで操縦してもそれほど難しくないから驚きである(画像13)。操作画面の内訳は、中央がメインの前方モニタ。左上がローアングルの前方サブカメラ、左中央はメインモニタ下側にあるボディ及びその下の地面などの状況を見られるサブカメラ、左下は後方ローアングルのサブカメラ。右上はレーザーレンジファインダの画像で、右はメインの後方カメラ。また、メインカメラは前後共にエッジモード、ズームイン・アウト、ホームポジションなどの機能がある。そのほか、無線受信状況、フリッパー角度、バッテリ状況、各パーツの温度なども表示されている
なお、一見すると視野が狭そうに思うかも知れないが、慣れるとこちらの方が操作しやすいそうである。現場では、防護マスクをした状態なのでモニタを見づらいだろうし、手袋も何重にはめて非常に指を動かしづらいだろうが、それでもこれならかなり操作しやすいのではないだろうか。

|

|
|
画像12。ゲームパッドと制御用のノートPC。あと充電器を加えるだけで、Rosemaryはどこででも運用可能 |
画像13。Rosemaryの操作画面。死角はもちろん存在するが、見えるべき部分がちゃんと見えているのであまり気にならない |
本来は滑落して破損すると危険なので、階段の上り下りはさすがに一般の方はできないのだが、階段の上り口のところも少しだけトライさせてもらった。階段を上る際は、前後のフリッパーの角度を調整する必要があるのだが、モニタ内に5個のカメラ映像に加えて、フリッパーの角度(そのほかバッテリ残量なども)が表示されているのでわかりやすい。本体とフリッパーの角度を一直線にするといった操作もワンボタンでできるのでとても簡単だ。
なお、ワンボタン切り替えといえば、前後もすぐに行える。モニタの前方カメラの映像ウィンドウに、今度はこれまでの後方カメラの映像が映し出され、前進と同じ操縦感覚で後退(ある意味、今度はそれが前進となる)できるのはQuinceから引き継がれた機能だ。
このように、素人がたった1回の挑戦でも階段にアプローチできるほどなので、原発建屋内は暗いという問題はあるかも知れないが、完全にふさいでしまっているガレキでもない限りは、どこにでも行けるのではないだろうか。Rosemaryなら廃炉に貢献してくれるだろうと、非常に期待できるのである。
また、Rosemaryの制御にはノートPC1台を使用するのみで、コントロールパッドと一緒に簡単に持ち運び可能だ。Rosemary本体と充電器とこの操縦系一式だけで、どこへでも持って行けるというコンパクトさは特筆すべき点である。そんなRosemaryのすごさをぜひ体感してもらいたい。また、近い内に正式発表があると思うので、そちらをお待ちいただきたい。最後は、Rosemaryの階段昇降を動画で見ていただくことにしよう(動画2)。
| 動画 | ||
|---|---|---|
 |
||
|
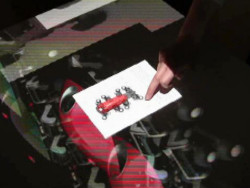
続いて進むと、壁側にあるのが、「魔法のカード ON THE FLY PAPER」だ(画像14・15)。全部で2台1組で3組用意されている。魔法のカード ON THE FLY PAPERはAR(Augmented Reality:拡張現実)技術を用いたコーナーで、ただの紙のカードがまるでタブレット型のコンピュータに変身してしまうのを体感できるというものだ。
天井にモーションセンサやカメラなどがあり(画像16)、まず机の上にカードを置くとその内容ごとに異なる映像がカードの上に投影される。そして、机の上には別の大きな映像が投影される。そしてカードのいくつかの場所に触れると、机の上の大きな映像や文字情報が変化。これまでfuRoが開発したロボットの画像やデータなどをいろいろと見られるという仕組みだ。

|

|
|
画像14。魔法のカード ON THE FLY PAPERは、2台1組で合計6台が設置されている |
画像15。机に近づいてみた。紙の部分だけ投影されていないので、机の表面がモニタのように見えるが、紙と紙を重ねると紙の上にも大きな映像が投影され、紙が透明になるような感じだ |

|
|
画像16。天井にあるのが、モーションセンサとプロジェクタ。レンズの周囲が赤くなっている方がモーションセンサ |
カードは10種類以上あり、fuRoのロボットに加えて、後述するが、「千葉工大惑星探査研究センター(PERC)」、そして千葉工大のそのほかの研究活動も見られるようになっている。とてもスムーズな感じで、映像がきれいだし、最新のAR技術の滑らかさを見て感じられるのが特徴だ。
カード自体が電子ペーパーか何かで、自分で映像を表示しているのかと思うほど、机の上ならどこに移動させてもブレたりズレたりせずにきれいに表示されるので、本当に滑らかである(動画3・4)。
筆者の感覚としてAR技術はもうちょっとギクシャクしている感があったので、もうここまで滑らかなんだと驚いた次第だ。まるで、SF映画の架空のインタフェースのような雰囲気というか、なんかマジックでも見ているような感じである。ぜひその感覚を堪能してみてほしい。
| 動画 | |||||
|---|---|---|---|---|---|
|

|
||||
|
|
||||
そして、タウンキャンパス内に入ってすぐ右側に横幅差し渡し15mほどの大きな「超巨大ロボティックスクリーン」がある(画像17)。iPadを利用したその操作卓がちょうどタウンキャンパスの中央にある(画像18)。このスクリーンはロボットアームとプロジェクタが合体しており、360度投影システム4台がコンピュータで連動する差し渡し15mの巨大映像の迫力がポイントだ。

|

|
|
画像17。超巨大ロボティックスクリーン。左右は差し渡し15m |
画像18。超巨大ロボティックスクリーンを操作するための装置 |
このスクリーン、誰も触っていない時は、左から右へ、前述した古田博士や小柳博士らが開発したfuRo製ロボットたちが、ほぼ実寸で移動するデモが行われる。190cm強の全高があるcoreが、鳥脚型の脚をノッシノッシと動かしていくその下を、小型のmorph3が何台も並んで歩いていたり、Halluc IIがガシャッガシャッというイメージで8本脚で移動(歩行音のSEがするわけではない)。Hallucigenia01やQuinceもすーっと走っていたりする。
これらはCGなのだが、かなりリアルな感じなので、実機を歩かせて撮影したのかと思ってしまうほどだ。なお、これらのロボットの中には、実機には用意されていないレアなカラーリングのものも登場する。
操作卓に表示されているいずれかのロボットを選択すると、実際に開発時に使用されたCADデータがそのまま表示される(画像19)。拡大・縮小・回転は自由自在なので、拡大するとアニメの巨大ロボットの設計図面のようにも見えるのが楽しい。
なお、超巨大ロボティックスクリーンの操作用のiPadには、独自開発のアプリが入れられており、それを用いてCADデータを表示し、そして拡大・縮小・回転などを行っているそうである。ちなみに、BGMもオリジナルだ。

|
|
画像19。超巨大ロボットスクリーンでは、これまでfuRoで作られたさまざまなのロボットのCADデータを見ることができる |
アトラクションの最後は、「千葉工大惑星探査研究センター(PERC)」が協力して開発した「火星探査船操縦シミュレータ」(火星シミュレータ)だ(画像20~22)。PERCは、宇宙と惑星と生命の起源・進化に迫る、国内大学初の研究機関として2009年に解説した千葉工大の研究機関である。fuRoとのコラボレーションによる火星探査を計画しており、今回はその協力関係の一環として、火星をターゲットとした探査船操縦シミュレータが実現したというわけだ。

|

|
|
画像20。火星シミュレータ。このシミュレータは着陸はしないので、軌道を周回する探査船を操っているイメージとなる |
画像21。メインコントローラ。3種類ある画像を選べる |

|
|
画像22。火星シミュレータを横から。シートは前後させられるので、お子さんが操縦したがっても問題ない |
火星シミュレータは、ドーム(没入)型スクリーンと左右のハプティック型の多軸操縦桿(左右・上下・手前奥)を装備している(画像23)。ちなみに、どこかで見たことがあると思う人がいたら、正解。つい最近まで日本科学未来館でHalluc IIの操縦コックピット「Hull(ハル)」として活躍していた装置を改良したそうである。
火星表面の映像は、NASAの探査機が衛星軌道から実際に撮影したものを用いており、肉眼で見たような可視光ベースの「COLOR」(画像24)、高低差がわかるように色づけされた「ELEVATION」(画像25)、地面の明るさがわかりやすい「ALBEDO」(画像26)の3種類がある。

|

|
|
画像23。6軸コントローラ。上下左右だけでなく、押す引くも可能だ |
画像24。COLORモードは、肉眼で見た形で火星を表示してくれる |

|

|
|
画像25。スクリーンの画像その2は、火星の高低差がわかるELEVATIONモード |
画像26。スクリーンの画像その3は、地表のどこが暗いか明るいかがわかるALBEDOモード |
火星シミュレータは、実はただCGが変化するだけではない。実は右手に火星儀とロボットアームがあるのだが(画像27)、このロボットアームと連動しているのだ。要するに、ロボットアームの先端にカメラがあるのだが、これが探査衛星の位置というわけである。
火星儀は通常は白だが、カメラの視界内に入ると色づく仕組みで、スクリーン上で迷子になってしまっても、火星のどの辺りを見ているのかがわかるようになっているというわけだ。
また、シミュレータにはツアー機能も搭載。標高約2万7000mという巨大休火山の「オリンポス山」や、全長4000kmと深さ7kmという「マリネリス峡谷(渓谷)」など、火星の有名なスポットも案内してもらえる仕組みになっている。
そして、火星儀の正面には大型スクリーンがあり、火星シミュレータのドーム型スクリーンに投影されている映像と同じものがこちらにも投影される(画像28)。操縦している人以外でも火星の様子を楽しめるようになっているわけだ。
実際に座って操作させてもらった感想だが、急激な動きには反応しにくいようなので、ゆっくりと動かすのがコツのようだ。実際、国際宇宙ステーションのロボットアームも非常にゆっくりと動くそうだが、焦ってはいけないのである。操作そのものは左右の操縦桿を動かしたい方向に向けたりするだけなので、小学生でも簡単に動かせるはずである。

|

|
|
画像27。ロボットアームと火星議。ロボットアーム先端にカメラが取り付けられており、ドーム状スクリーンに投影されている |
画像28。大型スクリーン。火星シミュレーターのドーム型スクリーンと同じ内容のものがここに表示される |
こうした千葉工大の最新テクノロジーを体感できるタウンキャンパスは、10時から18時までオープンしており、入場料は無料。アクセスとしては、京成線、都営浅草線、東京メトロ半蔵門線の押上駅B-3出口からが近い。
東武スカイツリーライン(東武伊勢崎線)のとうきょうスカイツリー(旧業平橋)駅からは、北十間川沿いに押上駅方面に向かって少し歩く形になるが、ノンビリ歩いても10分ほど。スカイツリーを訪ねる時は、ぜひタウンキャンパスも訪ねてみてほしい(画像29・30)。

|

|
|
画像29。入口のそばから奥の火星シミュレーター側を見渡したところ |
画像30。画像29とは逆に、出口側の火星シミュレーターのそばから入口方面を見たところ |














