カーロボティクス分野を手がけるゼットエムピー(ZMP)は年に1回、同社単独でのフォーラムを開催しているが、去る2011年11月29日に北青山のTEPIA@先端技術館(機械産業記念事業財団)にて第3回が実施された。個人的に興味深い講演があったので、チョイスしてお届けする。なお、記事で使用したプレゼン画面は、今回の各講演で使用されたPDFから抜粋させていただいた。
実は30年の歴史を持つ富士通のロボット研究
まず紹介したいのが、富士通研究所顧問、ロボットビジネス推進協議会監事、日本工学会監事、工学博士(東工大)などいくつもの肩書きを持つ内山隆氏による「ロボットの自律化技術とその応用」だ。
内山氏は、富士通研究所の所長を務めたこともある人物で、かつては同研究所でロボット、宇宙機器、コンピュータ周辺機器、情報記録装置の研究開発に従事し、極限作業ロボット・宇宙ロボット・介護ロボットなどの国家プロジェクトにも参加経験を持つ人物である(画像1)。

|
|
画像1。富士通研究所顧問、ロボットビジネス推進協議会監事、日本工学会監事、工学博士(東工大)の内山隆氏 |
富士通というと、あまりパーソナルユースのロボットを開発していないため、一般にはあまり知られていないが、これまで数多くの研究・開発用や商用ロボット、FAロボットなどをリリースしてきている。ここでは、そんな富士通のロボット開発の歴史と、実証実験、現状などが披露された。
富士通は1980年代からロボットを開発しており、最初はロボットハンドからスタートした。多関節型ロボット(ハンド)「マイクロアーム」(1981年)、商用多関節型ロボット(ハンド)「M6」(1983年)などである。その後、極限作業用ロボットとして「原子力用ロボット」(1983~91年)を開発している(画像2)。
さらに、90年代に入ると宇宙ロボットを手がけ、「無重力模擬装値」(1990)、「7自由度2腕協調ロボット(ハンド)」(1993)、「技術試験衛星7型搭載高機能ハンド」(1996)が開発された(画像2)。

|

|
|
画像2。富士通最初期のロボットたち。ロボットハンド系と原子力用ロボット |
画像3。90年代に開発された宇宙用ロボットハンドたち |
また、2000年前後にはマスコットロボットや小型の研究開発用人型ロボットも開発。前者としては、「タッチおじさんロボット」や「キティちゃんロボット」(1999-2000)などがある。後者は、HRPプロジェクトとして1998年から2003年にかけて開発された「ヒューマノイドロボット」シリーズで、2000年にまず「ヒューマノイドロボットシミュレータ」と「ヒューマノイドロボットHRP検証モデル」が披露された(画像4)。そのほか、1998年には、ヒューマンフレンドリロボットとして「福祉施設用食事搬送ロボット」も開発された(画像5)。
そして、1998~2003年にかけて「ヒューマノイドロボットプロジェクト」として開発されたのが、2000年に発表された「小型ヒューマノイド」(画像4)とその実用型である「HOAP」シリーズだ。HOAPは「1」(2001)、「2」(2003)、「3」(2005)と3まで開発された(画像6)。HOAPシリーズは、1個のメインCPUと23個のサブCPUを搭載した分散制御系が特徴の研究開発用である。

|

|
|
画像5。福祉施設用食事搬送ロボット |
画像6。HOAP-1、2、3 |
21世紀に入ってからは、2003年にホームロボット「MARON-1」(画像7)、2005年にサービスロボット「enon」(画像8)を発表し、そして最新型が2010年に発表された「子ぐま型ソーシャルロボット」(画像9)というわけだ。そのほか、正確な開発年は未確認だが、「卓上見守りロボット」(画像10)も紹介されていた。

|

|
|
画像7。MARON-1の構成。サイズは全幅320mm、全高320mmで、日本の家庭用となると、このぐらいのサイズがベストと思われる |
画像8。enon。サービスロボットとして、ショッピングセンターの試食サービスの実証実験や、富士通川崎研究所での案内業務担当としてのサービスなどを行っている |

|

|
|
画像9。子ぐま型ソーシャルロボット。家庭に導入するには、こうしたかわいらしさは必須だろう。お年寄りの見守りロボットなどの用途が考えられている |
画像10。子ぐま型ソーシャルロボットよりもさらに小型の卓上見守りロボット。やはりかわいらしさは必須で、こうしたデザインなら、「監視されている感」が生じにくい |
日本マイクロソフトがKinectを奥底まで解説
続いて紹介したい講演は、日本マイクロソフト デベロッパー&プラットフォーム統括本部 デベロッパーエバンジェリストの太田寛氏(画像11)による、「未来を先取りした最新テクノロジー。マイクロソフトの技術でロボティクス」だ。今やロボット業界で大もてのセンサ「Kinect」や「Robotics Developer Studio 4.0(beta2)」の紹介や解説などが行われた。

|
|
画像11。日本マイクロソフト デベロッパー&プラットフォーム統括本部 デベロッパーエバンジェリストの太田寛氏 |
Kinect関連で興味深かったのが、カバーが外されたKinect(画像12)やその構成図(画像13)などだろう。また、「Kinect for Windows SDK」の紹介と、それとKinectを用いた、人の動作キャプチャーしてリアルタイムに画像を加工して表示するなど(画像14・15)などのデモンストレーションも披露された。

|

|
|
画像12。Kinectのカバーを外した状態。これまでなら100万円前後の価格をしていた3次元距離センサが、1万円台で変えてしまうのだから、重宝されるのも当然 |
画像13。Kinectの構成図。全面のレンズは、赤外線、深度イメージCMOS、カラーイメージCMSの3種類。このほか、マイクロフォンで音声をキャッチしてどこにプレーヤーがいるかを確認する仕組みにもなっている |

|

|
|
画像14。Kinectがとらえた映像を、SDKを利用してさまざまな形でリアルタイムに出力中。左上はカラーイメージで、右が深度イメージ。左下は認識した2人を色分けしてスケルトン表示したもの。秒間30フレームで表示中 |
画像15。カラーイメージと深度イメージを重ねたもので(チューニングを行っていないためズレがある)、深度イメージのそれぞれは色分けしてある |
大学に浸透するロボットを活用した教育
このほか、金沢大学理工研究域電子情報学系の金子修准教授による、「e-nuvo WHEELを用いた学生実験事例」(画像16・17)、名古屋大学大学院情報科学研究科附属組込みシステム研究センター(NCES)の武井千春研究員による「RoboCar 1/10を用いた、車載データ統合アーキテクチャの評価」(画像18・19)、東京農工大学教授工学研究院長(工学府長・工学部長兼任)の永井正夫氏による「超小型電気自動車の運動制御と自動運転の事例紹介」(画像20・21)、そしてZMPのスタッフによる同社新製品の超光速小型オプティカルフロー(相対速度検出)センサモジュール「e-nuvo OpticalFlow-Z」の試作品によるデモンストレーションなども行われた(画像22)。

|

|
|
画像16。金沢大学理工研究域電子情報学系の金子修准教授 |
画像17。金子修准教授は、ZMPの平行2輪倒立振子型ロボット「e-nuvo WHEEL」を授業に活用している |

|

|
|
画像18。名古屋大学大学院情報科学研究科附属組込みシステム研究センターの武井千春研究員 |
画像19。武井研究員は「RoboCar 1/10を用いた、車載データ統合アーキテクチャの評価」と題した講演を行ったが、その中で自身が所属するNCESの解説も行った。位置付けは、「組込み産業界の大学病院」だそうだ |

|

|
|
画像20。東京農工大学教授工学研究院長(工学府長・工学部長兼任)の永井正夫氏 |
画像21。永井氏は「超小型電気自動車の運動制御と自動運転の事例紹介」と題した講演を行った。この場面は、自動運転の様子で、ドライバーが一切ステアリングに触れていないにもかかわらず、白線に沿ってカーブしていく動画 |

|
|
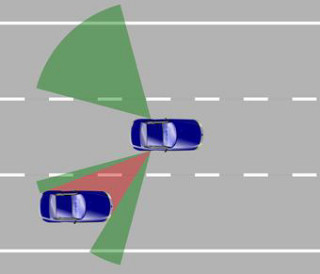
画像22。超光速小型オプティカルフロー・センサモジュール「e-nuvo OpticalFlow-Z」の試作品によるデモンストレーション。ハエの目を参考にして開発されたセンサで、ドップラー効果とは逆で、信号のイメージで接近してくるものは危険性があるので赤色、遠ざかっていくものは安全なので青で描画している |
ZMPのロボット教材を使った教育や研究、組込みシステム技術に関する研究・教育拠点として名古屋大学に設立されたNCESの活動内容、自動車の自動運転に関する研究などを題材とした講演だ。自動車の運動制御や自動運転などはZMPの得意とする分野なので、興味がある方は、第4回を楽しみにしていただきたい。