千葉工業大学・未来ロボット技術研究センター(fuRo)は9月16日、新規開発した大型2足歩行ロボット「core(コア)」を発表、報道陣に公開した。全高1.9m、重量230kgという、下半身型のプロトタイプロボット。関節用モーターなどを独自開発することで、可搬重量100kgという、2足歩行ロボットとしては世界最大クラスの運搬性能を実現した。

|

|
|
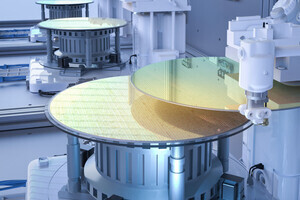
プロトタイプ1号機「core(コア)」。フレームは超々ジュラルミン製 |
ロボットは下半身のみ。バッテリはなく、電源は外部から供給されている |
同ロボットは2009年度より開始した「fuRo 搭乗型二足歩行ロボットプロジェクト」で開発したプロトタイプの1号機。その名称の通り、最終的には人間が搭乗できるロボットを目指しているプロジェクトであるが、fuRoの古田貴之所長によれば、下半身だけではなく、ロボットアームなど"上半身"の装備も検討しているという。
coreは人間と同様に、足首、膝、股に関節を持つが、膝の曲がる方向は人間とは逆、いわゆる"逆関節"構造を取る(膝が後ろに曲がる)。逆関節にした理由は、古田所長によると「どちらでも良かったが、ロボットに搭乗するとき、こうした方が簡単だから」ということ。なお自由度は、片脚6軸、両足で12軸。
関節駆動用の大型モーターシステムは新規開発。1個あたり、定格1,200W、最大3,000Wという大出力のブラシレスモーターで、電磁ブレーキ、絶対角度センサなども組み込んだ。通常、モーターは回転時だけでなく、停止時にも電力を消費し続けるが、このシステムでは停止時は電磁ブレーキによりメカニカルに固定されるので、省電力なのが特徴。

|

|
|
関節停止時は、モーターの電力をオフにできる。このとき電磁ブレーキも電力は消費しない |
関節駆動用のブラシレスモーター(右)と駆動回路ユニット(左)。どちらも新規に開発した |
両足の衝撃吸収機構も新たに開発したもの。前後左右4辺に取り付けられた独立可動型吸収器と、中央部の並列可動型吸収器によって、歩行時の着地の衝撃を80%も吸収可能だという。これにより、安定性や耐久性が向上しており、これらの特徴によって、100kg以上という大きな可搬性能を実現した。

|

|
|
衝撃吸収なしでは60G近い衝撃が加わるが、吸収ありにするとピークでも10G程度に抑えられる |
4辺の吸収器が上下に動いてまず床面にならう。続いて中央の吸収器でも衝撃を吸収する2段構え |
記者会見では、coreのデモンストレーションとして、歩行や屈伸の動作が披露された。可搬性能を証明するために、屈伸のときはダンベルで100kgの重りがボディに取り付けられていた。
| 動画 | |||||
|---|---|---|---|---|---|

|

|
||||
|
|
||||
「これは1つのランドマークのプロジェクト。ここで開発した技術や部品は、将来の福祉・介護ロボット、あるいはパーソナルモビリティなどで必ず使えるものになる」と古田所長は述べる。今後、coreで開発した要素技術を活用して、2012年に搭乗型2足歩行ロボットを完成させるほか、並行して中型サイズのロボットやパーソナルモビリティにも展開していく予定だ。

|

|
|
股関節はヨー軸付きの3自由度、膝が1自由度、足首が2自由度。片脚で6自由度という構成 |
足首のピッチ軸は、モーターがスネ部分に入っており、ベルトで動力を伝えている |

|

|
|
腰部に乗っているのは駆動回路ユニットなど |
転倒防止用に、研究室にはクレーン(0.5t)×2台を用意。1tまでは耐えられる |