
JR東日本とKDDIは1月10日、配送ロボットが自動で混雑回避や回遊販売を行うフードデリバリーサービスの実証実験をJR目黒MARCビルで行うと発表した。実験期間は1月11日~1月27日。
高輪ゲートウェイシティ(仮称)での実用化を目指す「空間自在プロジェクト」の一環。ビルに設置された防犯カメラなど、都市や街の設備から得た情報を収集・分析するデータ連動基盤(都市OS)とロボットの制御プラットフォームを連携させることで、高度かつ柔軟な運用を可能にする。
-
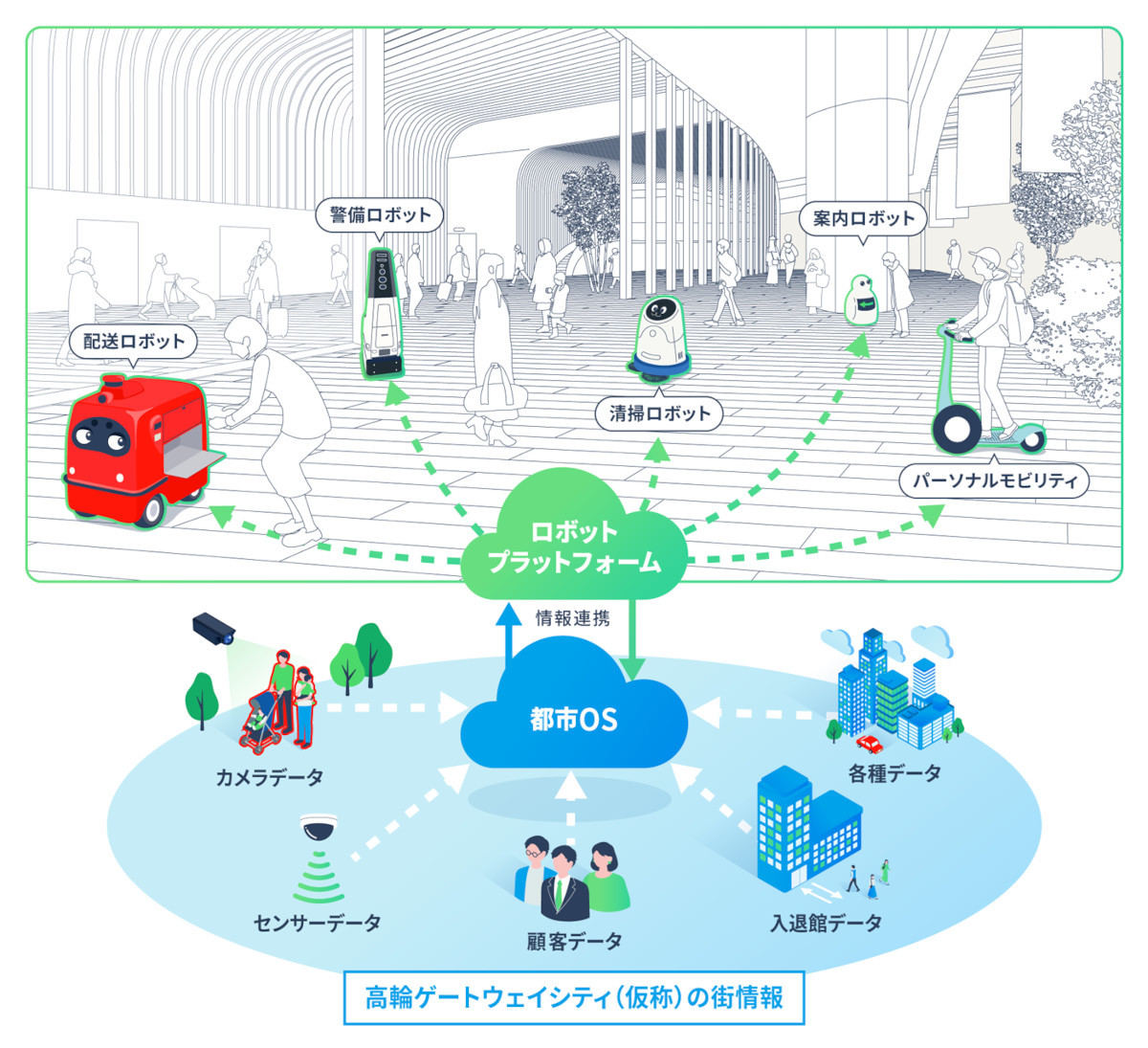
都市OSとロボットプラットフォームの連携イメージ

本実験ではJR目黒MARCビル内の勤務者を対象に、専用サイトから注文された弁当を配送するほか、ビル内のラウンジやロビーなど、人の多い場所に移動してお菓子や軽食を回遊販売する。
都市OSが防犯カメラの映像を解析して人の密集度を算出し、それを基にロボットプラットフォームが最適な走行ルートを決定して各ロボットに指示を出すという流れ。今回の例では、オフィスフロアへの配送時は混雑を避けられるルートを選び、回遊販売時は人の集まっている場所に向かう。
実験エリア内では配送ロボットのほかにメーカーが異なる警備ロボットも稼働しており、優先順位を付けた協調制御も検証する。また、エレベーターもロボットプラットフォームに接続し、人の手を借りずにフロア間の移動を含む自動配達ができる体制を構築する。
-

商品積み込み中の配送ロボット
-

他社製警備ロボットとの協調制御やエレベーターとの連携もテストする










