グラップルエンドエフェクタにより、1台のロボットアームに対しさまざまなエンドエフェクタやツールを切り替えることで、複数の仕事を実施することが可能なタスク性能が実現されている。
また移動性能に関しては、宇宙ステーションや月面有人活動拠点の各所にグラップルフィクスチャを複数設置することで実現される。片方のグラップルエンドエフェクタが1つのグラップルフィクスチャをつかんだら、アームを稼働させてもう片方のグラップルエンドエフェクタで次のグラップルフィクスチャをつかむという具合で移動していく。それを交互に繰り返せば、宇宙ステーションや月面有人活動拠点などの大型建造物でもシャクトリ虫のように移動していくことができ、移動先で作業を行うことが可能だという。
-

GITAI IN1は、足場ともいうべきグラップルフィクスチャを宇宙ステーション、月面有人活動拠点、人工衛星、ローバなどに用意することでそれらと接続が可能で、アームが届く範囲内に別のグラップルフィクスチャがあれば、シャクトリ虫のように移動可能 (出所:GITAI JAPANプレスキット)

さらに、人工衛星やローバなどの移動体にもグラップルフィクスチャを用意し、それらに接続することで、GITAI IN1自身が移動するよりも高い機動力を得て、広範囲での作業も可能となる。
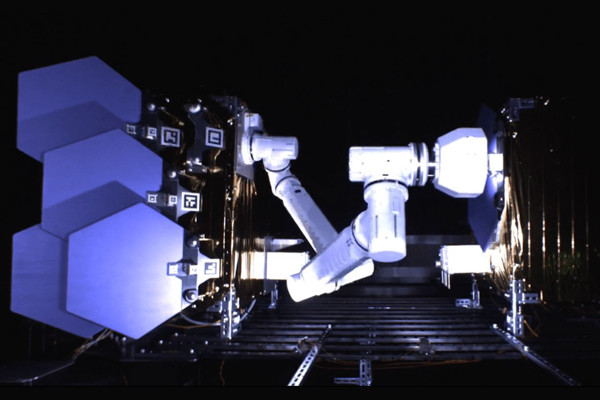
GITAI IN1とロボットローバGITAI R1を協調させて実施された今回の地上実証実験は、今後、月面探査や月面基地建設などで必要となるであろう作業が想定されたものだという。
JAXA相模原の模擬月面環境において、タスク性能と移動性能の観点から試験が実施され、タスク性能検証試験は、月面資源採取作業が想定された内容で、切削工具を使った資源サンプルの破壊、シャベルを使った資源サンプルの回収、牽引車を使った資源サンプルの運搬など、一連の作業を複数のツールを使い分けながら実現するという内容で行われた。一方の移動性能検証試験は、GITAI IN1自身が自律移動して月面着陸機からGITAI R1に乗り移り、作業地点まで移動して所定の作業を行った後、再び月面着陸機に戻るというものだったという。
なお、今後GITAIでは、すでに発表済みのロボットアームGITAI S2やGITAI S10と同様、GITAI IN1においてもTRL6(地上でのシステムとしての技術成立性の確認)、TRL7(宇宙空間でのシステムとしての技術成立性の確認)の早期の達成を目指して、開発を加速していくとしている。
GITAI IN1がJAXA相模原の模擬月面環境で実証試験などを行う様子を収録した動画 (出所:YouTube GITAI_Hiring in the USチャンネル)