ロボットを動かすための「仕組み」を学ぶ
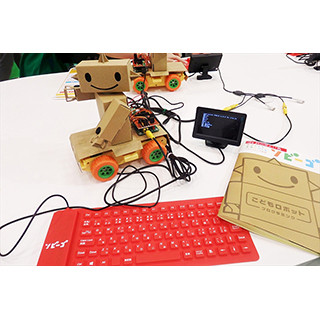
パートは1~8まであり、ロボットを組み立てる前にまずは「IchigoJam」がどういったものであるかを理解させるための章が用意されているのが秀逸だ。「IchigoJam」を中心に映像ケーブルやキーボードをつないで、子どもは入出力の仕組みを理解する。

|
「IchigoJam」につないだ映像ケーブルをテレビに接続し、電源をオンにすると、プログラムが起動しモニターに映し出される。プログラミング言語は、初心者向けにアレンジされた「BASIC」が採用されている |
次に最終的にはロボットの下半身となる車両に相当する部分に電池を入れ、電源ケーブルをつないでいく。ここではキーボードで入力したプログラミングによって、基盤上のLEDを点灯させたり消したり、また数値を変えることで点灯の長さも変えられることを実験的に学ぶことができるのだ。ロボットの動作自体には直接関係のない要素だが、コマンドという概念をシンプルかつ直感的に理解できる。

|

|
|
キーボードで「LED1」と入力すると基盤上のLEDが光った!数字を0に変えるとLEDが消え、子どもはプログラミング言語の基本中の基本がすぐに理解できた様子。「WAIT」などのコマンドを組み合わせたプログラムリストを入力し、少し複雑な指令の仕方も学んでいく |
|
同様に、次のステップでは腕を動かす"サーボモーター"の仕組みを理解する。サーボモーターを「IchigoJam」につないで、コマンド入力でまずはどのような動きをするのかを確認していく。やっていることは前章のLEDと同じだが、コマンドを変えて数字で角度を指定すると、今度はサーボモーターに取り付けた"サーボホーン"と呼ばれる部品がその通りに動く。動作の様子を見た我が子は「うわぁ!」と声を上げて喜んでいた。

|
ロボットを動かすための「サーボモーター」。「PWM」と角度を打ち込むとサーボモーターが動き、取り付けられたサーボホーンも連動して動き、そのまま腕の動きとして伝わる。LEDの時とは違う反応に、子どもは驚きとともに喜びの表情を浮かべていた。ロボットの可動部が動く仕組みを一発で理解した様子だ |
次の章ではロボットの足を動かす仕組みを学ぶ。ロボットの車輪部分のモーターを動かすには「IchigoJam」単体ではパワー不足なので「MapleSyrup」というもうひとつの基盤を連結させる必要がある。ここでは基盤を合体させる電子工作のみで、それ以前のプロセスで行ったような実験的要素はない。
……とここまでは特に難なくクリアーしてきた我が子だったが、予想外に苦戦していたのがロボットの工作だ。とはいえ、パーツは手で取り外していくだけでハサミなどは不要。折り目なども入っているため、組み立てやすい。

|
「IchigoJam」の役割やサーボモーターの仕組みを理解した後は、ロボットの組み立て作業に。パーツを搭載したりする箇所以外は説明書を参照しながら苦労なく組み立てている様子だった |
ただし、途中からは狭いすき間にサーボモーターや細いケーブルなどを収めた状態で組み立てていく必要があり、少し傾けたりすると位置がズレてしまったりするため、中身を押さえながらパーツをはめ込んだりしていかなければならず、なかなか苦労している様子。手先が器用な子であれば問題ない作業だが、折り紙などは苦手で不器用な我が子は少し手伝ったり、アドバイスをしたりしながらなんとか完成させた。

|
ロボットの上半身部分の大枠が完成。ここから電子部品を収めていく電子工作的な少し細かな作業となり、少々難儀していた |