デベロッパー部門アドバンストクラス(DAクラス)
DAクラスは課題解決のためにモデルを使うモデリング開発を実践するクラス。特に今回は競技・審査規約を大きく変更し、モデリングを実践するということを前面に押し出した。大きな特徴は走行体の変更と、「ブロック並べ」「ET相撲Neo」という2つのゲーム課題が用意されたことだ。前回大会(ETロボコン2015)までは「仕様未確定エリア」のように直前まで走行経路が決まらないという課題はあった。しかし、どちらかというと走行体をいかにうまく制御するかが競技のポイントになっていた点は否めなかった。今回用意された新走行体「HackEV(ハッケブイ)」は、走行自体は2輪+フリーホイールといった基本的な構成を取っており、前回使用していた3輪のトライクと比較して制御が格段に簡単になった。その分、ロボットが自律的に行動しなくてはならない難易度の高いゲーム課題を設定した。

|
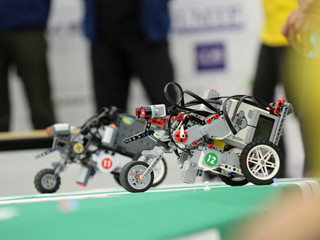
ETロボコン2016に登場した新走行体「HackEV」 |
Rコースの「ブロック並べ」はDAを代表するゲーム課題だ。ブロック並べエリアには格子状の4x4のラインと、その交点に赤青黄緑からなる4色のブロック置き場が用意され、ロボットはこのブロック並べエリアに置かれた4つのブロック(赤青黄緑黒の5色から移動不可の黒+3色がランダムで選択される)を同色のブロック置き場に運ぶことがミッションとなる。4つのブロックの配置は当日の朝に公開されるが、3つのブロックの色は走行直前にランダムに決定される。ロボットは事前の位置情報を元にブロックまで移動し、腕とともに稼働するカラーセンサーでブロックの色を検出する。この検出した色によってどこにどのような経路で運ぶかを自律的に判断し、ブロックを移動する。

|
ブロック並べの様子 |
Lコースの「ET相撲Neo」は走行直前に決められた星取の色を読み取り、プラレールの新幹線で囲まれた土俵上のブロックのうち、読み取った色以外のブロックを落とすというゲームである。土俵の周りは新幹線が周回しているため、超音波センサーで新幹線を検知し、ぶつからないように土俵に上がって降りなくてはならないのがポイントだ。こちらは前回まであった制御のテイストを残した課題といえる。

|
ET相撲Neo、新幹線攻略の様子 |
IoT、大規模複雑化の対応へ分析モデル審査を強化
もう1つ大きく変わったのがモデル審査である。ゲーム課題を攻略する上では、どのようなアルゴリズムが良いのかを考える必要がある。そのためには与えられた情報をモデルとして整理し、整理されたモデルをベースに解法を考えることになる。
今回の審査では従来からあったソフトウェアとしての設計モデルに加えて、その前段階としてモデルを使って問題や解法の情報を整理した「分析モデル」を審査対象とした。現在、IoTの広まりや大規模複雑化する組込みソフトウェアにおいては、単にソフトウェアを言われたまま作るだけでは品質や性能、保守性を高めることは難しい。一見難しく見える対象を分析モデルとして表して整理することで、よりよく理解が進み、シンプルな構造を見出すことができる。今大会では分析モデルを評価することで、こうした考え方を普段の開発でも取り入れてもらいたいという意図があった。しかし、チャンピオンシップ大会の前に行われた各地区のモデル審査結果からは、分析モデルをどう書いたら良いのかわからないチームが多数あり、チャンピオンシップ大会でどれくらい改善されていたかも競技とともに注目された。
DAクラス競技は、各地区からの選抜チームが集合しただけあってさすがにハイレベルな戦いが続いた。参加20チームのうち半数のチームが、Rコースのブロック並べでゲームを成功させていた。運ぶためのアルゴリズムもチームによって異なっており、競技時間2分のほとんどをブロック並べに費やしたチームもいれば、53秒でクリアしたチームもいるなど、制御・アルゴリズムの両面が揃ったチームが強かった。
LコースではHackEVの機能を使った多彩な走行が披露された。特に今回はあまり使えないと考えられていた尻尾を利用してET相撲Neoのブロックを落とすチームや、アームを使って停車場のスイッチを切り替え、新幹線を止めてから悠々と土俵に入るチームもいるなど、個性あふれる走行が会場を沸かせてくれた。
競技部門を制したのは北海道地区の常連チーム「Champagne Fight」(リコーITソリューションズ ES事業部 札幌事業所:北海道地区)。L/Rともに完全走破し、圧倒的なポイントで優勝した。走行前の試走ではメジャーを使って詳細に距離を測り、ラインすら見ることなく狙い通りの走行を実現させていた。この正確無比な制御はまさに彼らのノウハウの結集といえる。準優勝は前回に続き東海地区の「YoungMasters」(SCSK車載システム事業本部:東海地区)、3位は前回の優勝チームである「NiASET」(長崎総合科学大学:九州北地区)だった。参加者にとっては、この辺りのノウハウが蓄積されているチームにどうやって対抗していくかというのが今後の課題だろう。
モデル審査結果は、前回も技能賞を獲得した「Champagne Fight」(同上)がExcellent Model(優勝)を獲得した。全体的な完成度が高く、こちらも他を引き離しての優勝だ。Gold Model(準優勝)は「パプリカ」(富士ゼロックス:南関東地区)。同社も前回の大会で技能賞を獲得しているが、今大会は全員入社2年目の初参加メンバーでの受賞だった。Silver Model(第3位)は4位以下との僅差で「mono&科学の妖精」(ものつくり大学 / 聖望学園高等学校:北関東地区)が受賞した。新しい審査規約にも関わらず、学生チームが受賞したことは立派だといえる。
競技結果とモデル審査を総合した結果は、競技・モデルともに1位であった「Champagne Fight」(同上)が悲願の総合初優勝を果たした。準優勝はモデル審査で準優勝の「パプリカ」(同上)であった。競技は8位だったものの、モデルの評価で他と差があったため浮上した形となった。第3位は競技準優勝の「YoungMasters」(同上)。モデルの評価は5番目であったが、競技結果により3位となった。

|

|

|
|
(左から)総合優勝「Champagne Fight」、総合準優勝「パプリカ」、総合第3位「YoungMasters」のメンバー |
||
このように総合結果はモデルの評価が結果を大きく左右した。今大会の総合結果チャートを見るとその傾向がよく分かる。総合で上位に入るためにはモデルをいかに作り上げるかがポイントとなってくるだろう。とはいえモデルで優勝したチームでさえ、最高のAランクには達していない。特に分析モデルに関しては審査員をうならせるようなモデルは出てきていない。今回の上位のモデルを参考によりよいモデルを目指していってほしい。

|
総合結果のチャート |
著者紹介
・審査委員:土樋 祐希 富士ゼロックス

1997年入社。複合機開発のモデル駆動開発導入に携わる。2010年より社内でETロボコン参加活動を立ち上げ、2015年から本部審査員に参加。モデル駆動開発のユーザー会「xtUML.jp」の代表メンバーとしても活動中。

・審査委員:久保秋 真 チェンジビジョン

1963生まれ。1998年北陸先端科学技術大学院大学情報科学研究科博士前期課程修了。デジタル複合機等の開発、Mindstormsによる研修教材の開発・講師などに従事。オブジェクト指向技術、モデル駆動開発に興味を持つ。

・審査委員:幸加木 哲治 リコー

大学院時代にETロボコンの前身、UMLロボコン競技部門で優勝。その後、本部モデル審査員として参画。リコーにて、xtUMLの前身であるシュレイアー・メラー法を実践、ならびにソフト系新人教育、プロセス改善に従事し、現在は複合機を中心とする商品企画を行う。