NEC通信システムは9月12日、竹中工務店、センシンロボティクスと共に、MBS(Metropolitan Beacon System、3次元屋内外位置測位)の技術を活用したリアルタイム位置測位の技術実証を2023年8月に実施したことを発表した。同実証においては、自律航行型ドローンの制御に向けた屋内外でシームレスな位置測位が実現可能であることを確認したという。
-

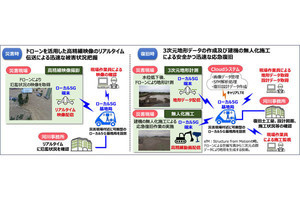
技術実証の様子

建設業界のDX(デジタルトランスフォーメーション)の一環として、自律制御可能なロボットやドローンの活用が検討されている。自律制御にあたっては機体の位置把握が重要になる。だが、現状では屋内外を問わずシームレスに位置測位が可能な技術が確立されておらず、ロボットやドローンを屋内外を問わず自律制御するのが難しいという。
例えば、GNSS(Global Navigation Satellite System)やRTK(Real Time Kinematic)などの衛星測位の技術は、屋外においては詳細な位置情報を得られるが、屋内では利用できない。そのため、屋内での位置測位では、SLAM(Simultaneous Localization and Mapping)/VSLAM(Visual SLAM)などのレーダーや映像を分析し、地図のマッピングと自己位置推定を行う方法を利用することが一般的だが、特徴点の少ない壁面では測位に失敗する場合や、似たような構造をしているフロアの区別ができないなどの弱点がある。
今回の実証では、3次元屋内外位置測位を行うMBSサービスを基に、数十ミリ秒ごとのリアルタイム測位を行う独自方式の位置トラッカー(以下、MBSトラッカー)を試作してドローンに搭載。屋外において係留状態のドローンを手動で航行させ、ドローンでRTKの位置測位をすると同時に真下の地面に向けてレーザー測距を行い、MBSトラッカー、RTK、レーザー距離計のデータを同時に取得して比較分析を行った。
また、MBSサービスの利用やデータの出力先としてクラウドとの通信を行うために、MBSトラッカーと地上との間はプライベートLTE方式であるsXGP(shared eXtended Global Platform)を用いて高信頼なデータ回線を構築した。
-
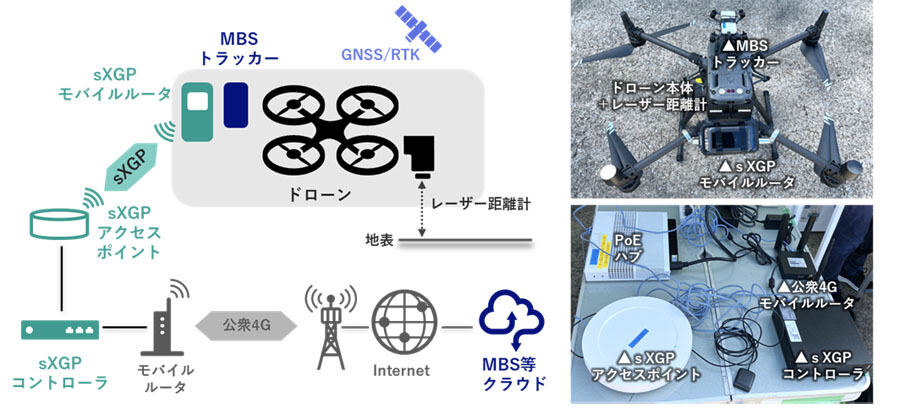
技術実証で用いたシステム構成の概要

今回の実証により、MBSサービスを基にしてリアルタイム測位を実現可能であることや、sXGPにより高品質なデータ回線が確保できることが確認できたという。また、高さの測位に気圧を利用するMBSに対して、ドローンのプロペラによる気圧の変動の影響についても確認することができ、測位誤差の修正に向けた知見を得られたとのことだ。
NEC通信システムは今回の実証結果を基に、リアルタイム位置測位の技術をドローンの自律制御と連携させて、屋内外をシームレスに運行させる技術を開発するという。