



多足ロボットで直線歩行時に回転バネの硬さに応じて曲がったり蛇行したりしやすくなる不安定さを生かし、左右の移動や旋回などを省エネかつ機敏にこなす技術を大阪大学大学院基礎工学研究科の青井伸也教授(機械力学)らが開発した。今後、3次元での移動を制御できるように試作を重ねて、災害現場や惑星探査での実用化に近づけていく。
がれきなど、人が立ち入ることが難しい場所にロボットを派遣しようという取り組みは、多足ロボットのほか、足がないヘビ型ロボットや小型の虫を模したロボット、ドローンといった飛ぶロボットなどで研究が進む。
青井教授は、ムカデの歩行に着目して多足ロボットの研究を進めてきた。多足ロボットは地面につく足が多くて転びにくく、一部の足が故障しても歩行を続けられるなど頑強さが利点だ。一方で、多くの足それぞれの動きを制御すると膨大な計算になり、エネルギー消費が増えてしまうほか、歩行中に急旋回などの動きも難しかった。
-
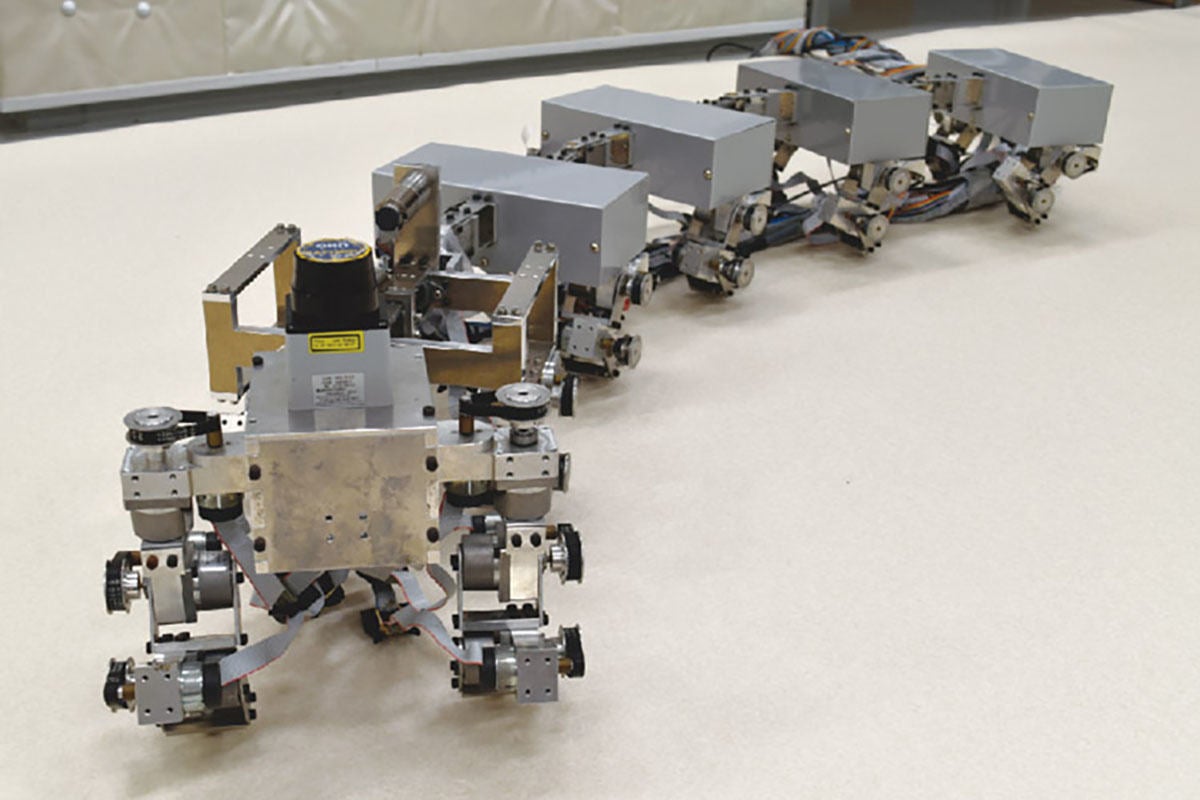
技術開発した多足ロボット(青井伸也・大阪大学教授提供)

ただ、これまでの研究成果から、体節の間に回転バネを入れて左右の動きを柔軟にすると、ある程度までのバネの柔らかさ(バネ剛性)ならばまっすぐ歩くが、一定以上の柔らかさになるとまっすぐ歩くことが不安定になり、左右のどちらかに曲がり安定することが分かっていた。
-
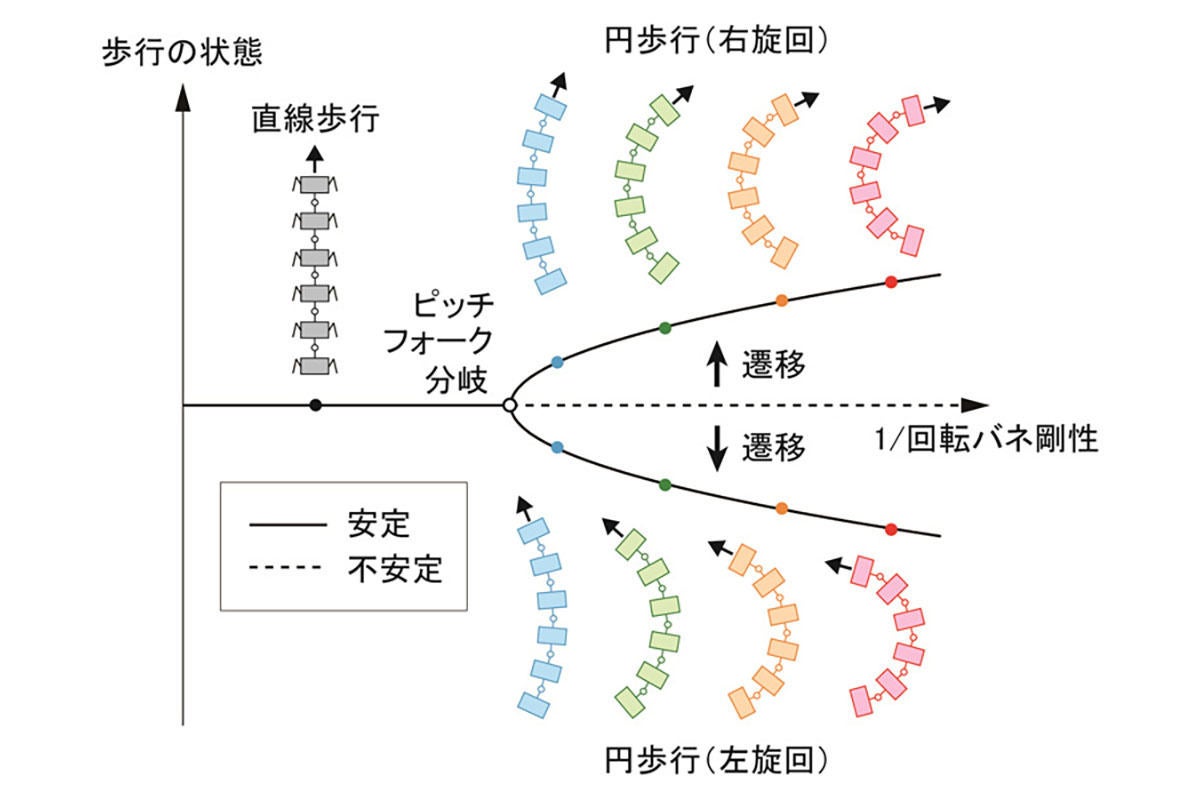
多足ロボットの体節間に入れた回転バネ剛性に応じた安定な歩行の変化。非線形力学系の重要な現象の一つ「ピッチフォーク分岐」が生じた(青井伸也・大阪大学教授提供)

今回の研究では、この不安定さを円歩行に遷移させる力として利用し、制御することで災害時に障害物を避けるなど機敏でエネルギー消費も抑えた効率的な歩行を実現することを考案。2つの足を持つ体節が6つ連なった長さ約1メートルの多足ロボットで技術開発に取り組んだ。
多足ロボットの先頭と2番目の体節をつなぐ部分について、これまで使っていたバネ剛性を変えることができない回転バネではなく、伸び縮みするバネを置き、ボールねじを使ってバネの長さを調整することで回転バネの剛性を制御できる仕組みを模擬的につくった。これにより直線歩行時の不安定さを自在に引き起こすことができるようにした。
まっすぐ歩くことが力学的に不安定な状況が生じた時、左右どちらに曲がるかを決定できるようにするため、先頭の体節についた左右の足を動かせるようにした。また、先頭に目標を見つけるカメラをつけることで、体を適度に曲げながら目標に向かって歩くことも可能になった。
-
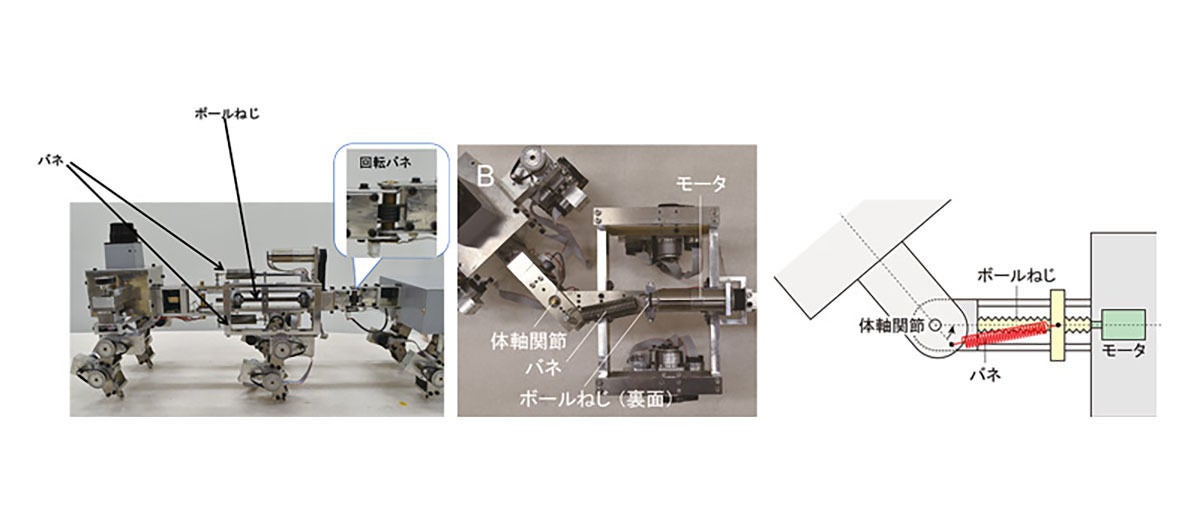
先頭と2番目の体節をつなぐ部分を回転バネのバネ剛性が変えられるのと同じ仕組みを作った。左は横から、中央(B)は上から見たところ。右は(B)の模式図(青井伸也・大阪大学教授提供)

一般的に、不安定性はロボットの制御では排除するべきものとされる。ただ、生物が動くときには不安定さをうまく利用しているという。青井教授は「足の数だけ運動計画をたてて複雑な制御をしなくても、力学的特性を利用してシンプルに多足ロボットを制御できた」と指摘。現状制御できている平らな床(平面)での移動から、がれきなどが重なる環境(3次元)での移動も可能になるように改良していけば実用化に近づくとしている。
研究は、京都大学と共同で科学技術振興機構(JST)創発的研究支援事業や日本学術振興会の科学研究費助成事業などの支援を受けて行い、米国科学誌「ソフトロボティクス」に掲載された。
|
関連記事 |










