東京大学大学院の研究チームは、修復能をもつ培養皮膚で覆われた指型ロボットの開発に成功したと発表した。
同研究成果は東京大学大学院情報理工学系研究科知能機械情報学専攻の竹内昌治教授、ニエ・ミンハオ助教、河井理雄氏(修士・研究当時)らによるもので、米国時間2022年6月9日付で科学雑誌「Matter」(オンライン版)にて発表された。
近年開発が進む人型ロボットの分野では、その被覆素材として、人間の皮膚に近い質感のシリコンゴムが利用されているが、自己修復能力やセンシング能力を持たないなどの点で、実際の人間とは未だ大きく異なる。また、ロボットを目視した際の印象も人間らしさに欠けている点も、大きな課題だという。
研究開始当時に修士学生だった河井氏は、生物により近いロボットの研究を行う環境に身を置く中で、皮膚のトラブルについて関心があったことから着想を得て、皮膚をまとったロボットに関する研究を開始するに至ったという。
-

今回登壇した河井理雄氏(提供:東京大学)

竹内教授らは、今回の研究にあたって、ヒトの皮膚から採取された細胞を基にした培養皮膚に着目。培養皮膚は、真皮細胞を含むコラーゲン溶液が培養により収縮することで形成される真皮組織と、その真皮組織に表皮細胞を播種し培養することで形成される表皮組織を合わせたもので、薬剤試験のモデルなどに利用されるなど広く流通している。
ただし培養皮膚は、真皮組織の性質である激しい収縮により3次元曲面で形成するのが難しい点や、表皮細胞の播種を多方面から行うために細胞が組織表面に留まりにくい点などから、ロボットには利用されてこなかった。
今回の研究では、皮膚の被覆対象として、円形に並んだアンカー構造を持つ三関節指型ロボットが使用された。
培養皮膚の形成手法として、ロボットを挿入したケースに真皮細胞を含むコラーゲン液を注入し、そのまま3日間の培養により真皮組織を形成させた後、PDMS製ケースに移したロボットを回転させて表皮細胞を複数方向から播種し、14日間培養するという方法がとられた。
この結果、ロボットを被覆する3次元での培養皮膚組織の形成に成功したという。真皮組織が収縮してもアンカー構造により組織がロボットの周囲に固定され、また形状に合わせたほぼ均一な厚さの培養皮膚が形成されたとのことだ。
-
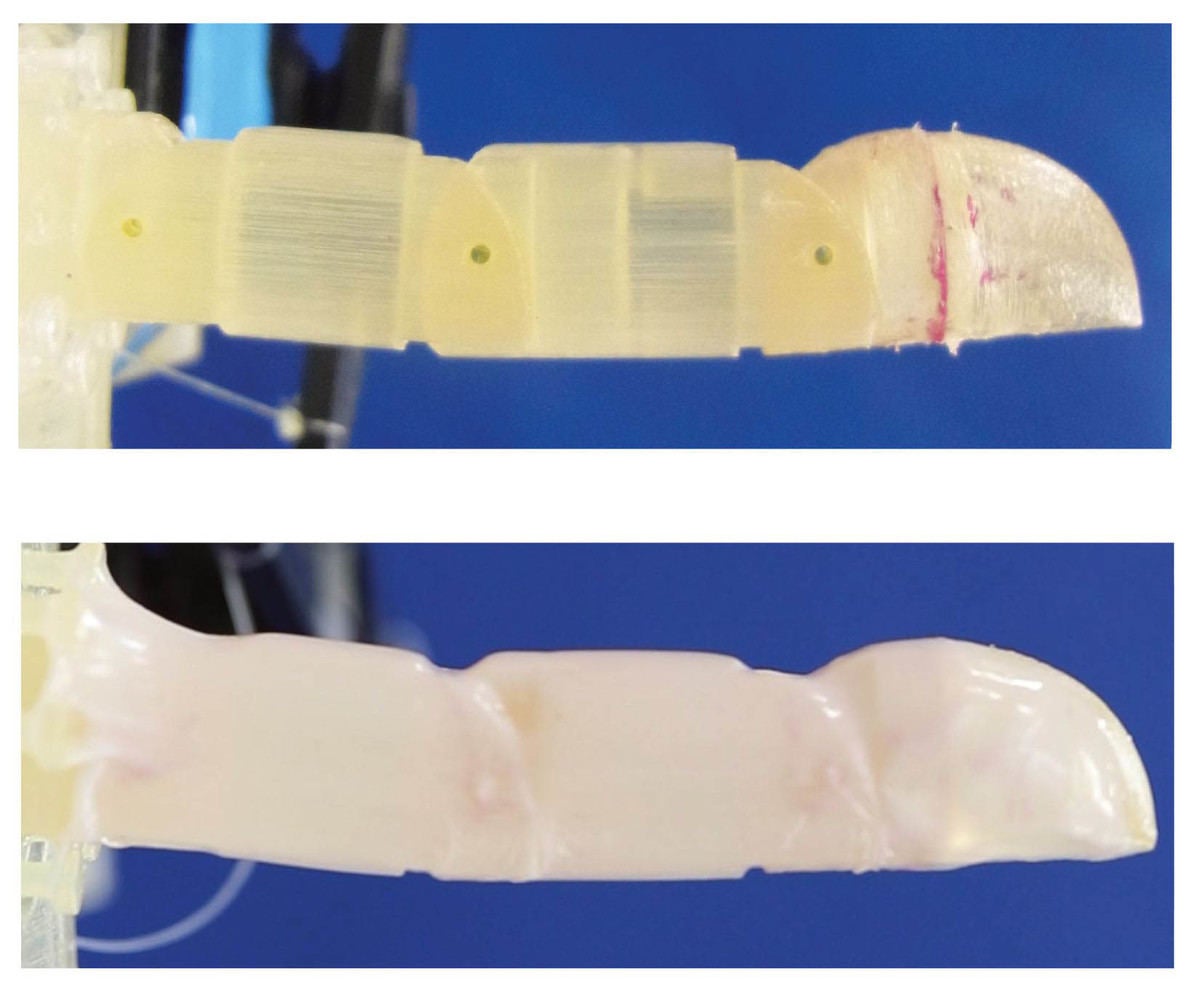
培養皮膚を被覆したロボット(提供:東京大学)

この培養皮膚組織については、数十回の関節運動では破断などが見られず、運動を繰り返すことで関節部分にはしわが形成されたという。また、培養皮膚表面には、撥水性のある表皮層が形成されることも確認できたとしている。
-

培養皮膚を被覆したロボットが関節運動を行う様子(提供:東京大学)

またこの培養皮膚がもつ特徴として、コラーゲンシート貼り付けによる創傷の修復能力が挙げられる。
研究では、ロボットに被覆した培養皮膚の表面に創傷を作製し、創傷部分にコラーゲンシートを張り付け、培養液に浸す方法で実験が行われた。
その結果、7日ほど培養液に浸すことで、傷口に張り付けたコラーゲンシートに真皮細胞が移動し、シートと傷口の接着力が強化されたとのことだ。
接着力の評価についてはコラーゲンシートの引張試験が行われ、コラーゲンシート同士を張り合わせ7日間培養を行ったもの、培養皮膚にコラーゲンシートを張り1日間培養を行ったもの、培養皮膚にコラーゲンシートを張り7日間培養を行ったもの、の3サンプルで測定を実施したという。
-

培養を行うことで自己修復が進行する。(提供:東京大学)

そして測定結果の比較から、真皮細胞が存在することにより修復強度が回復することと、培養日数が長くなるにつれて強度回復が進行することが、いずれも確認できたとした。
生物と無生物の長所を兼備するバイオハイブリッドロボットの研究を行う竹内教授は、今後、ロボットの機能性向上に向け、神経系や感覚器など別の生体組織を形成・搭載することを目指すという。また同時に、大型化や長寿命化も行うことで、実用可能なバイオハイブリッドロボットの開発を目指すと語った。