宇宙航空研究開発機構(JAXA)は7月12日、小惑星探査機「はやぶさ2」に関する記者会見を開催し、現在の状況や小惑星到着後の運用予定などについて説明した。はやぶさ2は、1年後の2018年6月~7月に目的地である小惑星「リュウグウ」へ到着する予定。これまでのところ大きな問題は起きておらず、機体の状態も健全だという。

|
|
JAXAの津田雄一・はやぶさ2プロジェクトマネージャ。順調ということもあり、会見中は終始笑顔だった |
L5で未知の小惑星探査も実施
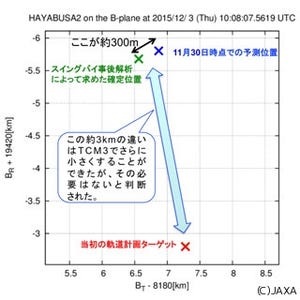
はやぶさ2に関する記者会見は、地球スイングバイを行った2015年末以来。JAXAの津田雄一・はやぶさ2プロジェクトマネージャはまず、前回の会見以降に実施した内容について報告を行った。
まずイオンエンジンの運用についてであるが、第1期の噴射を2016年3月~5月、第2期の噴射を同年11月~2017年4月に実施。運転時間はそれぞれ798時間と2,558時間で、往路の噴射としてはすでに半ばを越えたことになる。今後、2018年初めから最後の第3期噴射を行い、運転時間は最長の2,700時間となる予定だ。

|
|
イオンエンジンは3期に分けて運転する。第3期が無事に完了すれば、いよいよリュウグウに到着だ (C)JAXA |
まだリュウグウが観測できるような距離ではないため、科学的な成果はこれからとなるが、2017年4月、太陽-地球系のラグランジュ点であるL5付近を通過する際、未知の小惑星がないか望遠カメラ(ONC-T)で撮影を行った。残念ながら見つけることはできなかったものの、「科学観測の練度を上げる良い訓練になった」(津田プロマネ)という。

|
|
もともと発見の可能性は低かったそうだが、「はやぶさ2はチャンスを逃がさない精神」(津田プロマネ)のため挑戦 (C)JAXA |
さらに2017年5月には、木星の撮影も行った。距離が遠いため、惑星で最大の木星といえどもほぼ点にしか写らないが、これはカメラのキャリブレーションのために実施したものなので問題は無い。木星は十分観測された対象であるため、観測機器のキャリブレーションに利用するにはちょうど良いのだ。

|
|
木星を撮影してキャリブレーションを行った。これまで、木星のほか、火星や恒星の撮影も行ったという (C)JAXA |
また工学的には、アップリンク・トランスファーやKa帯通信といった、さまざまな新技術の実証も行っている。
アップリンク・トランスファーは、探査機と通信する地上局が切り替わる際、通信を維持したままにする技術だ。従来は、再び電波を捕捉するのに数10分~1時間程度の時間をロスしていたそうだが、この技術を使えばその無駄がない。「小惑星に到着したら24時間運用が続く。そのときにこういう技術が威力を発揮する」(同)

|
|
2016年11月に、臼田-米国DSN間で成功。複数の海外局を持つ米国などではすでに実現していたが、日本はこれが初めて (C)JAXA |
Ka帯通信は、はやぶさ2のハイゲインアンテナで使われている通信方式だ。日本の探査機で搭載するのはこれが初めてで、2016年6月~7月に米国DSN局との間で通信に成功した。このときの距離は約5,000万km。リュウグウからだと3億km以上離れるので、それに比べればまだ近いのだが、所定の性能が出ていることを確認できた。

|
|
初号機のX帯に比べ、はやぶさ2のKa帯は4倍高速にデータを送信できる。大量の観測データを送信するのには欠かせない (C)JAXA |
リュウグウ到着後のシナリオ案
さて、リュウグウ到着を1年後に控えて、もっとも気になるのは到着後の予定だろう。まだ小惑星の形状や自転軸の傾きなどが分からないため、運用スケジュールが決定するのは実際に到着して小惑星を観測できてからになるが、今回の会見ではシナリオの一例が紹介された。

|
|
紹介されたシナリオの例。実際には、順番が大きく変わる可能性がある (C)JAXA |
この例では、到着後に小惑星の初期観測を行い、着陸地点を選定(LSS)。2回のタッチダウン(TD1/TD2)を実行したあと、インパクタ(SCI)を衝突させてクレータを作り、3回目のタッチダウン(TD3)でその付近への降下を試みる。ローバーとランダーの放出は、TD1の前と、TD3の後にタイミングが用意されている。
リュウグウが現在の想定通りであれば、ほぼこのシナリオ通りになる可能性もあるが、実際にはさまざまな要因により、順番が前後したり、回数が変わったりする。
たとえば、もし自転軸が天王星のように横倒しになっていれば、時期によっては、探査機から同じ半球しか見えないことも有り得る。この場合、タッチダウンできる場所が限られてしまう。また小惑星の重力が強いと、その分だけ推進剤の消費量が増えるため、タッチダウンの回数を減らす必要があるかもしれない。

|
|
この5項目がすべて未確定。これが分からない限り、小惑星近傍での運用スケジュールは決められない (C)JAXA |
このシナリオでは、2019年前半で、すべてのタッチダウンを終わらせる計画。リュウグウを出発するのは同年11月~12月の予定なので、かなり余裕があるように見えるが、これは小惑星が太陽に近くなると表面の温度が上がり、探査機には危険だからだ。実際の温度次第では、タッチダウン可能な期間が長くなったり短くなったりすることもある。
現在、JAXAではさまざまな条件を考慮しつつ、運用のシナリオを検討中とのこと。それと同時に、運用を模擬した訓練も行っている。このために、3億ポリゴンの小惑星3Dモデルを作成。これを使い、LSSの訓練などを実施しているそうだ。

|
|
小惑星の3Dモデル。このような3Dモデルを活用した運用訓練は、初号機ではやっていなかったそうだ (C)JAXA |
リュウグウはどこまで分かった?
肝心のリュウグウの最新情報であるが、残念なことに、依然として確実なことはあまり分かっていない。最新の観測結果によると、自転軸の傾きは-40°±15°とのこと。最悪の横倒しケースは考えなくても良さそうだが、「確度は低い」(同)と見ており、この範囲外でも対応できるよう考えているそうだ。

|
|
はやぶさ2は地球を背にして降下するため、自転軸の傾きにより、タッチダウン可能な場所(青いエリア)が変わってくる (C)JAXA |
じつは、はやぶさ2のリュウグウの様子は、初号機のときのイトカワ以上に分かっていないのだという。イトカワは、米国が事前にレーダー観測を行ってくれたことから、到着前にある程度形状が分かっており、自転軸の向きも正確に決まっていた。しかし、リュウグウはレーダーが届くほど地球に接近しなかったため、これができなかった。

|
|
説明する吉川真・はやぶさ2ミッションマネージャ。イトカワの場合、到着前にこのくらいの精度で形状が分かっていた |
ただ、この「よく分からない」状態も広報に活用する計画。吉川真・はやぶさ2ミッションマネージャによれば、今後、小惑星到着前に「リュウグウ予測コンテスト」のようなものを実施することを検討しているそうだ。
はやぶさ2は今後、2018年初めころよりイオンエンジンの運転を再開し、同年5月ころより光学航法でリュウグウに接近する。津田プロマネは、「小惑星に到着するまでのナビゲーションが最後の山場。位置があやふやな小惑星に対し、ピッタリ高度20kmの位置に付けないといけない」と述べ、気を引き締めた。