新エネルギー・産業技術総合開発機構(NEDO)は2月17日、2009~2013年度にかけて実施している国策ともいえる「生活支援ロボット実用化プロジェクト」の成果を用いて、パナソニックのフルリクライニング車いす付きベッド「リショーネ」(画像1~3)と、ダイフクの「安全技術を導入した配送センター内高速ビークル(無人搬送車)システム」の安全技術「エリア管理システム」(画像4~6)に対し、生活支援ロボットの安全性に関する国際規格で、2014年2月1日に正式発行されたばかりの「ISO13482」)の認証が世界で初めて与えられたことを発表した(画像7)。

|

|

|
|
電動ケアベッドの一部が電動リクライニング車いすとして分離することで、介護を受ける方に負担をかけることなく、ベッドから車いすへの移乗をスムーズに行うことができるリショーネ。さらに、1人の介護者だけで簡単・安全に移乗介助できるため、被介護者の離床機会を増やすだけでなく、介護者の負担軽減に繋がるのが特徴だ。画像1(左):電動ケアベッド状態。画像2(中):車いす分離。画像3(右):電動リクライニング車いす状態 |
||

|

|

|
|
ビークルシステムは走行レールおよび給電線がなく、自動ステアリング機能を持つ自走台車を運用するもので、フレキシビリティの高い搬送システムである点が特徴となっている。従来は安全性のため分速60m(時速3.6km)しか出せなかったが、ビークルシステムでは分速200m(時速12km)まで出すことが可能だ。画像4(左):エリア管理システムの概念図。UWBタグにより、作業者・フォークリフト・ビークルの位置を計測し、位置情報を基にエリア管理システムがビークルを制御し、高速性と安全性を両立させている。画像5(中):作業車が物陰から急に飛び出してきた場合でも、ビークル(右側の白い自走台車)を事前に減速させて安全性を確保。画像6(右):味の素物流の館林物流センターの協力を得て、実作業中にビークルを走行させ、エリア管理システムの安全性が検証された |
||

|
|
画像7。JQAのパーソナルケアロボット認証マーク(リショーネに発行されたもの) |
日本では、少子高齢化が急速に進展しており、労働力の不足が懸念されている。このため、ロボット技術は産業分野だけではなく、介護・福祉、家事、安全・安心などの生活分野への適用が期待されているところだ。しかし、生活分野における生活支援ロボットの安全性技術に関する国内外の規格などは未整備だった。そのため、民間企業の独自の取り組みでは技術開発も産業化も加速されないことから、安全性基準に関する国際標準等の整備が求められていたのである。
生活支援ロボット実用化プロジェクトでは、生活支援ロボットとして産業化が期待される4タイプのロボット(移動作業型(操縦中心)、移動作業型(自律中心)、人間装着(密着)型、搭乗型)を対象に、プロジェクトに参加しているロボットメーカー、試験研究機関および認証機関などが密接に連携しながら本質安全・機能安全の試験を行い、安全性などのデータを取得・蓄積・分析して具体的な安全性検証手法の研究開発が行われてきた。
その開発拠点として2010年に茨城県つくば市に設立されたのが、「生活支援ロボット安全性検証センター」(画像8)だ。同センターは、生活支援ロボットの主要な安全性試験が行える18の試験設備を整備しているのが大きな特徴。同センターにおいて、各種生活支援ロボットの安全性検証試験が行われ、現在はプロジェクトの最終段階だがさらなる試験方法を研究開発中だ(プロジェクト終了後は介護ロボットの試験センターとしても活用予定されている)。

|
|
画像8。生活支援ロボット安全性検証センター |
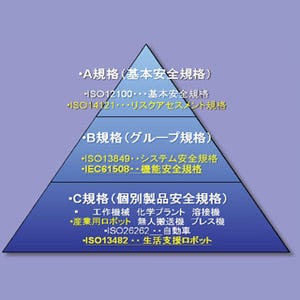
さらにプロジェクトでは、国際標準化提案と認証手法の開発を行ってきたが、この認証を受けることにより、第三者が安全性を確認したことになり、生活支援ロボットに対する安全性評価が高まり、普及を促す効果がある。オールジャパン体制の努力が実り、前述したように2月1日に、プロジェクトの提案を基にした、安全に関する国際標準規格ISO13482が正式発行されたというわけだ。
今回、JQAは2月17日付けでパナソニックの「リショーネ」とダイフクの「エリア管理システム」に対して、生活支援ロボット安全検証センターにて認証のための安全性試験を実施し、さまざまな角度から安全性の検証が行われ、国際基準を満たす安全性が確認されたことから、一般財団法人日本品質保証機構(JQA)により、2月17日付けで両社に対する認証書が発行されたというわけだ。今回、ついにISO13482が認証されたことにより、安全認証を受けようとする企業活動が活性化され、さらに安全性を高めた生活支援ロボットの活躍が期待できるようになると見られている。
今後、NEDOは生活支援ロボットの安全検証手法の開発を進め、プロジェクトに参加しているほかのロボットの認証の早期実現を目指すという。また国際標準化提案活動に関しては、試験方法やロボット形式各論についての提案活動を行うと共に、ほかの関連する規格の提案活動などを継続していくとした。さらに、日本発の安全性を高めた生活支援ロボットの研究開発や、安全性の試験および認証事業に関わる環境整備等を推進し、日本が誇る安全な生活支援ロボットの世界的な普及やロボット産業の発展に貢献していくとしている。