東京大学は、従来の概念とは反して、同一の身体運動が異なる脳活動パターンによって実行されうることを明らかにしたと発表した。研究は、東京大学大学院教育学研究科の野崎大地教授と、同平島雅也助教らの研究グループによるもので、成果は「Current Biology」オンライン版に2月9日に掲載された。
手を伸ばす・握る、ジャンプする、蹴るなど随意的に行われる身体運動は、一次運動野や小脳などの運動を司る脳領域の活動によって実行・制御される仕組みだ。つまり、脳の活動パターンが決まれば、それに対応する身体運動も自動的に決まることになる。
またこの因果的関係の存在から、逆に身体運動が決まれば、それに対応する脳活動パターンも唯一に決まるという考え方となり、これまで違和感なく受け入れられてきた。これは、運動制御の研究分野で、動作の速度や向きなどの特徴が、脳内の神経活動としてどのように符号化されているかという研究が、数多く行われていることからも見て取ることが可能だ。
今回の研究は、身体運動が決まれば唯一の脳活動パターンが決まるというこの従来の考え方に反し、同じ身体運動が多様な脳活動パターンによって生み出されうることを明らかにしたのである。
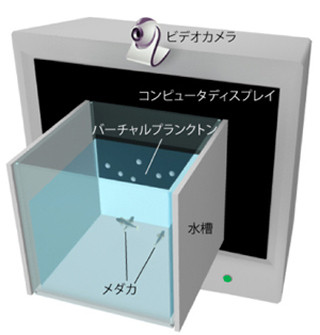
被験者は片手でロボットアーム(画像1・2)のハンドルを動かし、スクリーン上のカーソルを、スタート位置から別々の位置(±30度)に配置された2つのターゲットに向かって交互に移動させる(画像3・A)。被験者は自分の手を直接見られない形だ。
なお、ロボットアームは、運動学習研究に用いられる特殊な作りをしているのが特徴だ。被験者がハンドルを握って、PC画面上のカーソルを操るなどの運動課題を行う。この時のハンドルの位置、速度を精密に計測できると共に、さまざまな力をハンドルに加えることができる仕組みである。
また、実験の詳しい流れは、(A)まずスクリーン上で左右に配置されたターゲットに向かって交互に手を伸ばす。手の位置情報はカーソルで表示される。(B)カーソルに回転変換を加えると、カーソルをターゲットに到達させるために、被験者が気づかないうちに、徐々に手の運動方向が前方にシフトしていく。(C)最終的には、いずれのターゲットを狙っている時にも、手が常に前方に動くという状態に収束する。そして、(D)この同一の手の運動に、それぞれ右向き・左向きの力場を加えて、適応できるかどうかが調べられた次第だ。

|

|
|
画像1(左):ロボットアームを用いた実験系。ロボットアームのハンドルを片手で握って動かす。画像2(右):スクリーン上のカーソルの動きを操作する |
|

|
|
画像3。実験の流れ |
実験の流れを詳細に述べると、途中から右側のターゲットに対してはカーソルがハンドルの動きから時計回りにズレるように、左側のターゲットに対してはカーソルがハンドルの動きから反時計回りにズレるような設定が課される仕組みとなる。ただし、被験者がズレの存在に気づかないよう、ズレの大きさを試行回数と共に少しずつ大きくしていく(画像3・B)。
このような設定を行うと、ズレの大きさを約38°まで増やすと、被験者は別々のターゲットに向かって手を伸ばしていると信じこんでいるにも関わらず、いずれの場合も手がまっすぐ前に向かって動いている、という奇妙な状況を創り出すことができたのである(画像3・C、画像4)。手の動きだけでなく、腕の筋肉から「筋電」(画像5)を計測しても、両者の筋活動パターンには外見上見分けがつけられなかったほどだ。筋電とは、筋肉の収縮時に発生する生体電気信号のことで、装着型のロボットや義手などは筋電で動作するものがある。
画像4についてもう少し触れると、カーソル回転変換中(画像3・B、同C参照)のカーソルの軌道(左図)と実際の手の軌道(右図)を表したものである。被験者が見ているカーソルは別々のターゲットに向かって動いているが、実際の手の動きは徐々に近づき、最終的にはほとんど同一になってしまう。それでも、被験者はこの回転変換の存在には気がつかないのである。

|

|
|
画像4。カーソル回転変換中(画像3B、同C参照)のカーソルの軌道(左)と実際の手の軌道(右) |
画像5。カーソル回転変換に適応後(画像3・Cおよび画像4参照)に腕の筋肉から計測した筋電図信号。カーソル回転変換により、最終的に手の運動方向は前方方向に収束するが、動きだけでなく筋活動パターンからみても両者は見分けがつかない |
なお、この奇妙な状況のもとでは、被験者が60°内(±30°)のどこに手を伸ばそうとしても、必ず手はまっすぐ前に動いてしまう。運動を行う意図・計画の段階では60°の広がりを持っていた空間が、運動実行の段階で、ほぼ0°に収縮してしまうのである。
これら同一の運動は、同じ脳活動によって実行されているのかどうかを調べるため、手をまっすぐ伸ばそうとすると、手が右もしくは左に逸れてしまうように働く右向き・左向きの力場を課した時、被験者が適応できるかどうかを調べる実験手法を用いた(画像3・D)。
これまでの研究から、次にどちらの方向の力場が手に加わるかがわかっていても、同一の手の運動を右向きの力場と左向きの力場の両方に適応させることは極めて難しいことは確認済みだ。
力場への適応は、運動の生成を担っていた脳活動が力場に応じて変化することによって達成されるが、まったく反対の2つの力場を交互に課された場合、その脳活動の変化がどっち付かずになってしまうのである。
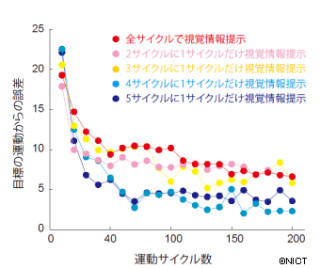
しかし、同一の手の運動が異なる脳活動によって実行されているのであれば、別々の2人が独立に学習できるのと同様に、2つの力場に同時に適応することが可能になるはずである。その予想の通り、被験者は容易に同一の手の運動を正反対の力場に適応させることができた(画像6)。
そして、画像6は、手の軌道が前方に収束した後、左向き(左図)および右向き(右図)の力場を加えた(画像3・D参照)力場適応前後の手の軌道である。適応前は力の方向に大きく軌道が膨らむが、適応後はまっすぐな軌道を取り戻す。このまっすぐな軌道が腕全体を強張らせて実現されているのではないことは、適応後、力場を切ると、力場と反対方向に軌道が膨らむ残効が観察できることからわかるというわけだ。

|
|
画像6。力場適応前後の手の軌道 |
今回の研究の結果により、同一の身体運動が多様な脳活動によって実行・制御されうることが明らかになった。この結果は、膨大な数の神経細胞を利用して、まったく同じことを、さまざまなやり方で実行できる脳の性質、つまり冗長性を示すものであり、脳が視覚的な情報をもとに運動実現のための適切な運動指令を生成する機序の理解につながると考えられるという。
また、動作の計画が異なっていれば、異なる脳活動パターンが同一の腕運動を生成できたように、多様な脳活動パターンを同一の身体運動に人為的に割り当てることができること、それにより同一の運動にさまざまな運動スキルを習得させることも可能であることも示された。
今回の研究で用いられた方法論を応用することにより、同じ動きにさまざまな運動スキルを習得させる練習方法、脳梗塞などで障害を受けた脳領域の活動を代替する脳活動パターンを誘導するリハビリテーション手法などの開発にもつながると期待されると研究グループではコメントしている。