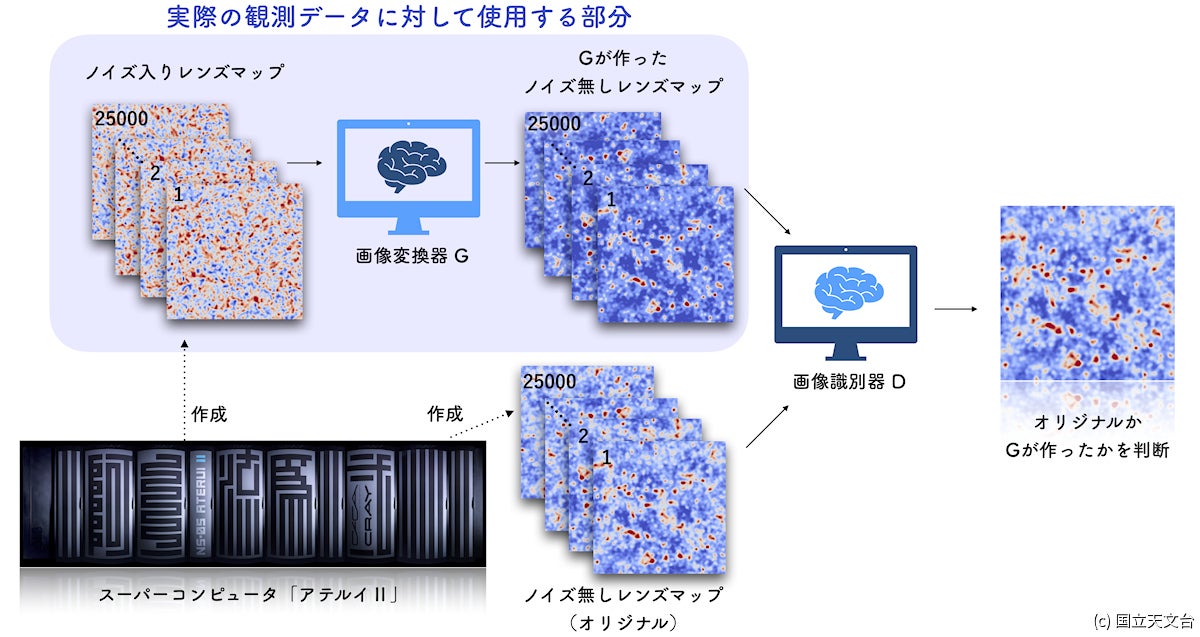
今回の研究で用いられた「敵対的生成ネットワーク」(Generative Adversarial Networks:GAN)の概念図。GANは、2つのネットワークで構成される。1つ目のネットワークは画像変換器Gと呼ばれ、ノイズ入りレンズマップからノイズなしのレンズマップを推定して出力する。2つ目のネットワークは画像識別器Dと呼ばれ、変換器Gが作成したレンズマップと真のノイズなしレンズマップとを見比べて、変換器Gが作成した画像を偽物と見破ろうとする。2つのネットワークに多数のノイズなし・ありレンズマップのペアを入力することで、Gはより本物に近いレンズマップを作るように、Dはより正確にGの作る偽物を見破るように訓練されていく。今回の研究では、アテルイIIを用いた数値シミュレーションで得られる2万5000組のノイズなし・ありレンズマップのペアを使うことで、安定に動作するネットワークが作られた。最終的に、訓練された画像変換器Gが、実際にHSCで観測されたノイズ入りレンズマップを入力され、ノイズなしレンズマップを推定するという流れだ (c) 国立天文台 (出所:国立天文台天文シミュレーションプロジェクト Webサイト)


無限に広がる大宇宙や話題のドローンといった航空関連に関わる情報やトレンド、ホットなニュースを毎日更新。ロケットや人工衛星、宇宙飛行士、天文観測、ドローン、エアレースなど、身近な話題から素粒子やダークマター、重力波といった、最新科学の話題まで、詳細な説明付きで紹介します。