今後、軌道上の衛星の数は急増
現在、各国の民間企業が、観測や通信のサービスを提供するため、衛星コンステレーションの構築を進めている。特に、OneWeb、SpaceX、Amazonなどは、衛星の数が数千機にもなるという大規模なもの。現在、軌道上で稼働中の衛星は世界でも合計2000機ほどとみられているが、今後は民間のメガコンステにより急増することが予想される。
-

大規模コンステレーションの登場により、衛星数は一挙に上昇する
-

世界で計画中のコンステレーション。これらの企業が顧客の候補となる


伊藤氏は、「宇宙にもロードサービスが必要」と主張する。地上だと、事故時にはレッカー車が来て、渋滞を解消してくれる。事故に備え、充実した保険もある。宇宙にも、それと同じような仕組みが必要だという。アストロスケールが狙うのは、まさに宇宙のロードサービス事業というわけだ。
-

アストロスケールは、宇宙のロードサービスを目指すという

コンステレーションで衛星1機が故障したとき、代替機でリプレースしたいというニーズがあるだろう。しかし全ての衛星に軌道離脱のシステムを搭載しようとすると、それだけ重くなり、打ち上げ費用が高くなってしまう。もし同社のEOLサービスの方がコスト的に有利なのであれば、選択してもらえる可能性は十分ある。
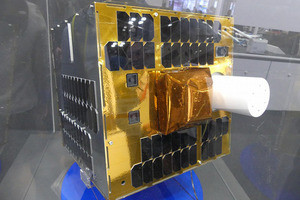
今度のELSA-dで目指すのは、このEOLサービスの技術実証である。デブリを除去するためには、デブリに接近し、状態を診断し、回転を合わせて捕獲して、再突入するという、一連の技術が必要になる。ELSA-dは、母船である捕獲機(Servicer)と、子機の模擬デブリ(Client)で構成。軌道上で分離して、捕獲技術を実証する予定だ。
-

「ELSA-d」は、180kgの捕獲機と20kgの模擬デブリで構成する

どうやってデブリを除去する?
接近と捕獲の方法には、従来、「協力型」と「非協力型」があった。協力型はお互いが制御下にあるケースで、宇宙ステーション補給機「こうのとり」が国際宇宙ステーションに捕獲される場合などがこれに相当する。しかし既存デブリはそもそも制御できないので、難易度が高い非協力型にならざるを得ない。
同社のEOLサービスがユニークなのは、その中間のカテゴリとして、「準協力型」を設けたことだ。顧客の衛星には、捕獲時のマーカー・結合部となる「ドッキング・プレート」を事前に搭載してもらう。このプレートは重量がわずか200gしかないので、衛星事業者の負担は小さい。捕獲の難易度も、非協力型よりは下がる。
-

同社のEOLサービスは準協力型。非協力型はADRサービスで対応する

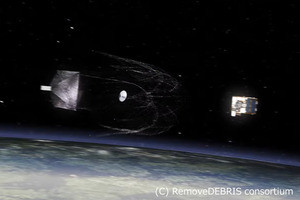
ELSA-dでは、3段階の技術実証を行う予定だ。まず1回目は、普通に分離して捕獲するだけ。次の2回目では、内蔵リアクションホイールを使って、分離時に模擬デブリが回転する。母船はその状態を解析して、うまく回転を合わせて捕獲する必要がある。最後の3回目ではさらに難易度を上げ、一度見失う距離まで離れる。衝突しないような軌道で追跡してから、捕獲を行う。
ELSA-dのミッション動画。3つの技術実証が分かりやすく紹介されている
EOLサービスは、ELSA-dの後に本物のデブリを捕獲する実証ミッションを成功させてから、ビジネス化する予定。一方ADRサービスの方は、ELSA-dの技術をさらに発展させ、開発プロジェクトを進めるという。どちらもサービスインの時期としては、2030年代を想定している模様だ。
-

今後の技術ロードマップ。EOLとADRという2つのプロジェクトを進める

デブリ除去には倫理的な側面も
ただ、技術課題は「まだたくさんある」という。捕獲機構は、様々な方法が考えられる。同社は当初、トリモチ方式を想定していたものの、宇宙空間で粘着力が弱まる課題があったため、現在は磁力で吸い付けるシンプルな方式を選択している。さらに、安全に接近するためには、画像処理や危険予測などソフトウェア技術の向上も欠かせない。
-

デブリの状態は様々。それぞれの捕獲方式には一長一短あって難しい
-

地上からの操縦だと間に合わないため、自動制御が重要となる


今後、持続可能な宇宙活動を保証し、宇宙ビジネスの発展を支えるためには、デブリの脅威が無い、安全な宇宙空間の維持が必要不可欠。しかし伊藤氏は、理由は「それだけではない」という。「デブリは全て人間が生み出したゴミ。自分達で汚したものは自分達で片付ける。倫理的な意義もあると考えている」とまとめ、講演を終えた。