脚ロボット
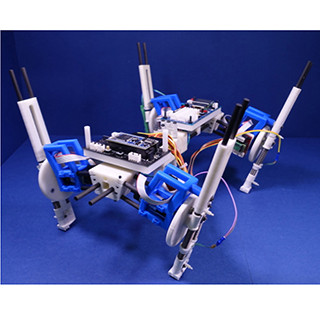
脚ロボット「WAREC-1」は、高い移動能力と作業能力の実現を目指す4足ロボットだ。自由度は1足あたり7で、合計28自由度。各関節の可動範囲が広く、2足歩行、4足歩行、腹ばい移動、垂直はしご昇降など、多様な移動方法に対応することが大きな特徴だ。足はすべて共通構成で手と足の区別はないため、逆立ちも問題無い。

|

|
|
2足で立った状態。この時の身長は1,690mmで、重量は約150kg |
こちらは4足歩行。2足歩行よりも安定して移動することができる |
ロボットが移動する場合、2足より4足の方が安定するが、足場が崩れたりすると、転倒する危険性がある。しかし、胴体を接地させる腹ばい移動は、すでに転倒状態であるとも言え、瓦礫の上などでも、より安定した移動を実現できる。

|

|
|
腹ばい移動では、胴体を接地させてから、すべての足を前方に運ぶ |
これは逆立ち状態。上の写真と異なり、胴体は腹側が見えている |
WAREC-1はこれまで、各移動モードをそれぞれ個別に実装してきたが、今回、初めて各モードをスムーズに変更できるようになった。デモでは、2足→4足→腹ばい移動→2足(逆立ち)と、切り替える様子が披露された。
プラントなどの作業では、はしごの昇降機能も求められる。WAREC-1はこれが可能であるのだが、通常の4足ロボットだと、はしごの手前で2足で立ち上がり、さらに接近する動作が必要になる。しかしWAREC-1だと、逆立ちしてそのままはしごに取り付けば良く、動作に無駄が無い。

|
|
逆立ちができると、垂直はしご昇降のときに便利 |
今後は、環境認識機能を追加し、腹ばい移動から垂直はしご昇降を連続して行えるようにするとのこと。そしてさらにハンドも追加して、作業能力も持たせる予定だ。
脚型ロボットのデモ
ヘビ型ロボット
ヘビ型では、2種類のロボットのデモが行われた。1つは前週に公開されたばかりの空気浮上式のロボットで、別記事にすでにまとめてあるのでそちらを参照してもらうとして、ここではもう1つの方を紹介することにしたい。
このロボット「T2 Snake-3」は、プラント内の巡回点検などを目的に開発が進められているもので、搭載した車輪で移動する方式。細いヘビ型なので狭いところでも通れるほか、ロボットの長さを活かし、胴体を持ち上げることで、配管など高さ1m程度の障害物を乗り越えることができるという。ロボットの全長は1.7m、重量は約10kg。

|

|
|
デモでは、高さ70cmの障害物を乗り越えてみせた |
本体は細く、狭いパイプの中を通ることも可能だ |
発表されたのは今年4月だが、今回公開されたロボットでは、先端にグリッパーが追加されており、探査だけでなく、作業することも可能になった。このグリッパーは、仕組みが非常にユニーク。柔らかい膜の中に粉体が詰まっていて、空気を抜いたり戻したりすることで、固くなったり柔らかくなったりできる。
この機構を使うと、バルブを回すような作業も可能。柔らかい状態のまま押しつけ、形を馴染ませてから固体化。バルブを把持した形になり、その状態でグリッパーを回転させればいいわけだ。この機構は小型化・軽量化に適しており、ヘビ型ロボットにも搭載できる。そのほか、精密な位置合わせが不要というメリットもある。

|

|
|
先端に搭載されたグリッパーで、5種類のバルブはすべて開閉できるという |
押しつけてから固くし、バルブを回転させると、水が流れ出た |
ちなみにグリッパー内部の粉体であるが、いろいろ試してみたところ、なんと"コーヒー豆の粗挽き"が一番良かったそうで、実際にこれを使っているとのこと。実用化の際には、おそらく工業的に製造できる素材になると思われるが、意外なものが使われているのはちょっと面白かった。
ヘビ型ロボットのデモ