東京大学生産技術研究所附属海中工学国際研究センターと海上保安庁海洋情報部は、熱水鉱床などの海底鉱物資源を発見する手法として、測量船-航行型海中ロボット-ホバリング型海中ロボットという3段階でそれぞれ異なる観測プラットフォームを用いる手法を検討してきた。
今回、第2段階の東京大学が開発した航行型の自律型海中ロボット「r2D4」の成果を受けて、第3段階の東京大学生産技術研究所、海上技術安全研究所、海洋工学研究所がシップアンドオーシャン財団からの助成を受けて共同開発したホバリング型の自律型海中ロボット「Tuna-Sand」をメタン地帯として知られる黒島海丘において海域展開を実施、海底の広範囲モザイク写真を作ることに成功し、利便性と汎用性を実証したことを発表した。
ホバリング型海中ロボットが調査を行ったことは、世界でも初めてのことで、これによりメタンハイドレートや熱水鉱床などの海底エネルギーや鉱物資源の発見・開発につながる海底の詳細な地図作りに向けた新たな方法が構築されることとなる。
海底の地図作りとしての第1段階は、測量船による海面からの地形図の作成で、1000m深度であれば約20mメッシュの図により、海底の形状や地質学的性質を調査する。
第2段階は、第1段階により特定された海底の、航行型海中ロボットによるサイドスキャンソナー観測で、従来、サイドスキャンソナー観測は曳航体を用いておこなわれてきたが、ケーブルから受ける外乱などにより曳航体の運動が安定せずに、精度のよいものが得られないという課題があった。航行型海中ロボットを海底面近く(例えば50mの高度)に航行させ観測すると、数m以下の精度での観測が可能になるため、この情報を用いて、地形の細かな特徴を理解し、目標海底の絞り込みが可能となる。
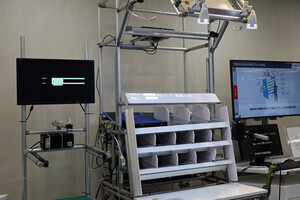
そして第3段階として、第2段階の観測に基づいて絞り込んだ海底に、ホバリング型海中ロボットを潜航させ、目標海底の全面を写真撮影し、海底面の詳細を画像にてとらえることとなる。
黒島海丘での海域展開は、2010年6月に実施。海上保安庁の測量船「明洋」からTuna-Sandを展開、r2D4により新たに発見されたポックマーク群やスクラッチマーク群などの全自動写真撮影に成功し、海底(深度約630m)の広範囲のモザイク画像を短期間で作成することに成功した。
なお、これらの成果を受けて東大らによる研究チームでは、提案する3段階の観測手法が確立したことで、新たな海底資源の発見および開発が促進するものと期待するとしている。