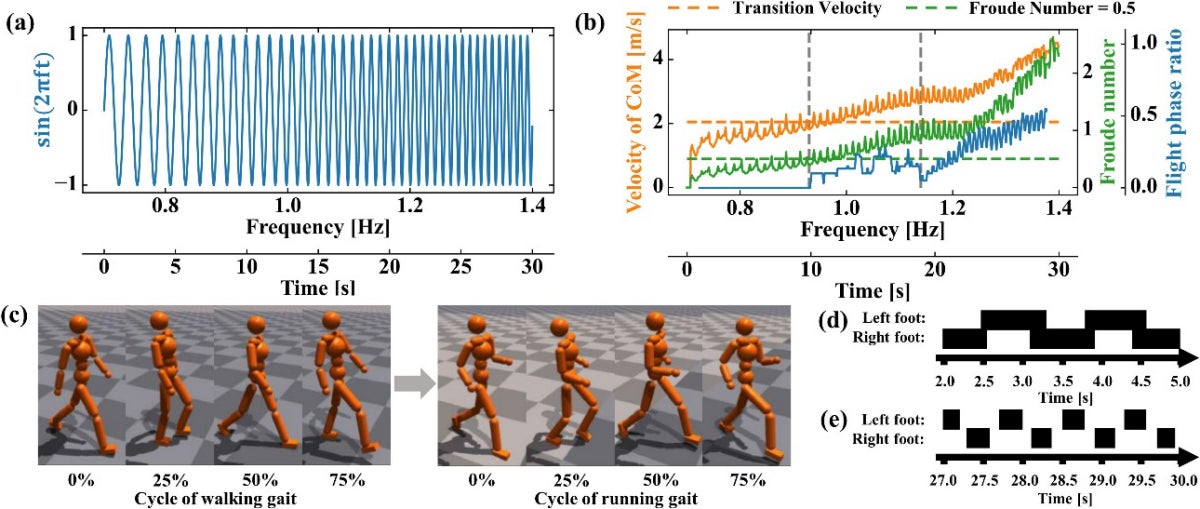
AI-CPG法を用いて制御された歩行から走行への遷移過程。(a)CPGコントローラのリズムジェネレータへの入力として、周波数が増加する正弦波信号が用いられた。(b)重心速度、フロード数、飛行位相比。黒い破線は歩行が変化する箇所が示されている。(c)歩行から走行への遷移の様子。(d)歩行サイクルの時間図。(e)走行サイクルの時間図(出所:東北大プレスリリースPDF)


東大、培養皮膚を使用した細胞由来の生きた皮膚を持つ顔型のロボットを開発
名大など、可動域を無限に延長可能なモジュール型磁気送りねじ機構を開発
シーメンスが後押しする製薬業のDX化、世界と戦える工場の現場の姿とは?
東北大、骨格筋ロボットをヒトのように歩行させられる技術を開発
AIが切り開く人間の新たな可能性、アクセンチュアの「Technology Vision 2024」
日本の製造業の根幹に存在する「ものづくり」。そんな製造業の第一線で活躍するエンジニアたちに、シミュレーションや3Dプリンタ、3D CADの活用などで大きく変わろうとしている現場の情報や技術トレンド、ホットなニュースをお届けします