中日本高速道路(以下、NEXCO中日本)などは6月20日、現在建設中の新東名高速道路において、自動運転時代に向けた路車協調実証実験の模様を公開した。実証期間は5月13日から7月末ころまでの約3カ月間。
-

実証フィールド上のデモ車両

実証実験の全体概要
高速道路は一般道よりも車の走行速度が速く、停止までに時間を要する。そのため、前方の事故や異常をいち早く検知して減速や車線変更といった対策を取ることが重要だ。この際、高速道路に設置されたセンサーや車載センサーの情報を互いに連携して運用する「路車協調」により、事故や路上の落下物などを早期に把握できるようになれば、安心で快適な走行につながると期待できる。
今回の実証フィールドとなるのは、E1A 新東名 新秦野インターチェンジと新御殿場インターチェンジの一部区間。この区間には約2.8キロメートルの一般区間と、約3.1キロメートルのトンネル区間を含む。実証区間は建設中ながら、舗装やレーンマーク、防護柵など完成形で整備されている。
-

実証区間

実証に用いる一般区間には、100~600メートルごとに支柱を設置。参加企業や団体らはそれぞれの実験内容に応じて任意の場所を選び、支柱に実験用のセンサーやアンテナなどを搭載する。
-

道路に設置した支柱とアンテナ

実証実験に参加するのは、沖電気工業、KDDI、交通総合研究所、ソフトバンク、名古屋電機工業、日本電気、富士通、古河電気工業、三菱重工機械システム、三菱電機の10社。NEXCO中日本が募集した7つのユースケースに、参加企業・団体から提案のあった3つのユースケースを加え、計10のユースケースについて23件の実証実験を実施する。
募集したユースケース
・路上障害情報の後続車への提供
・路面状況や走行環境に応じた最適な速度情報などの提供
・車載センサーなどを活用した維持管理情報や運行支援情報などの収集と提供
・コネクテッド車の緊急停止時における遠隔監視と操作
・交通状況に応じた情報提供による高速道路ネットワークの最適化
・交通状況に応じた車群情報の提供による交通容量の最大活用
・目的地別の追随走行支援
提案ユースケース
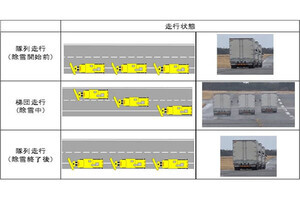
・風除け走行先行車適性診断
・休憩施設内オンデマンド自動運転サービスを想定した駐車スペースの利用効率向上
・車両とインフラ間の情報連携による情報収集と提供の強化
デモでは、このうち「路上障害情報の後続車への提供」と「コネクテッド車の緊急停止時における遠隔監視と操作」が披露された。


路上障害情報の後続車への提供(デモ動画)
路上障害情報を後続車へ提供する実証のデモでは、先行する赤い乗用車(コネクテッド車)が故障して走行車線上で停止し、その情報を後続の自動運転トラックが受信して、減速および車線変更して回避する様子が公開された。
より具体的な流れは以下の通り。路上で停止した先行車両が故障情報を送信すると、路側に設置したアンテナがその情報を受信して故障可能性情報を生成する。この情報は道路に埋設した光ファイバーなどを通じて後方のアンテナへと伝えられる。この故障可能性情報をトラックが受信すると、自動運転により車線を変更する。
NEXCO中日本「高速道路の自動運転時代に向けた路車協調実証実験」デモ ユースケース1
NEXCO中日本「高速道路の自動運転時代に向けた路車協調実証実験」デモ ユースケース1空撮映像 (提供:交通総研)
NEXCO中日本「高速道路の自動運転時代に向けた路車協調実証実験」デモ ユースケース1車内カメラ (提供:交通総研)
-

後続車(トラック)の社内映像、運転手の手元に「第1車線 故障車」とアラートが出される

コネクテッド車の緊急停止時における遠隔監視と操作(デモ動画)
コネクテッド車の緊急停止時における遠隔監視と操作では、自動運転機能の故障などにより路肩に緊急停止した車両を遠隔から操作するデモが公開された。デモでは、白のワンボックスカーが故障して緊急停止したと仮定し、故障情報を発信。この情報を受けた模擬管制センターでは、運転シミュレーター(遠隔運転装置)から故障車に接続し、遠隔操作によって安全な路側に退避して、そこから本線へと復帰した。
NEXCO中日本「高速道路の自動運転時代に向けた路車協調実証実験」デモ ユースケース4 (提供:KDDI)
NEXCO中日本「高速道路の自動運転時代に向けた路車協調実証実験」デモ ユースケース4
-

KDDIの遠隔運転装置

KDDIの担当者は「KDDI VISION 2030の中で定める、『つなぐチカラを進化させ、誰もが思いを実現できる社会をつくる』の下で、モビリティ領域でもつなぐことに注力している。ユースケースの創出を通じて、今後もつなぐチカラを進化させられたら」とコメントしていた。
物流の2024年問題解消にも期待
NEXCO中日本の経営企画部長である前川利聡氏は、「私たちはより安心・安全・快適な高速道路空間を提供したいと思い自動運転への取り組みを進めてきた。道路と車両の情報を連携して補完することで快適な走行を支援するためにも、路車協調は重要となる。我が社として何ができるかを考えた結果、新東名高速の中で建設途中のこの空間をうまく利用できないかと思い実証実験を公募した」と、実証実験に至った経緯を説明していた。
-

NEXCO中日本 経営企画部 部長 前川利聡氏

自動運転は物流の2024年問題の解決に資する方策の一つだと考えられる。政府も自動運転車優先レーンの社会実装を表明している。今回の実証実験結果は、関係省庁や有識者らによって検討された「デジタルライフライン全国総合整備計画」におけるアーリーハーベストプロジェクトの中で、新東名 駿河湾沼津サービスエリアと浜松サービスエリアの約100キロ区間で計画されている自動運転車優先レーンの設置にも活用されるとのことだ。
前方の故障車を自動で回避し車線変更する技術など、多くの人がイメージするような"自動運転"の実現がいよいよ近付いてきたことを体感できるデモが披露された。また、万が一自動運転車に不具合が起きた場合に備えて、遠隔から車両を操作する技術も開発が進められていた。高速道路がより快適で便利になれば、運転手が不足する物流業界の労働環境改善などに役立つだろう。また、筆者も一人の高速道路利用者として、これから車での旅路がより安心で快適な楽しいものになると感じられた。