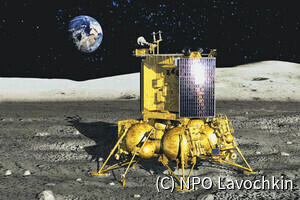
鹿島建設と宇宙航空研究開発機構(JAXA)の両者は11月8日、鹿島建設の実験場「鹿島西湘実験フィールド」(神奈川県小田原市)とJAXA相模原キャンパスを結んで、自動遠隔建設機械による月面環境での作業を想定した実証実験を行い、月面での永久陰領域などでの施工に必要となる構成技術・要素技術の妥当性を確認したことを共同で発表した。
同成果は、鹿島を代表としてJAXA、芝浦工業大学の3者が2021年から参画している国土交通省の公募事業「宇宙無人建設革新技術開発推進事業」の研究開発によるもの。
-
(左)月面環境に適応した自律遠隔施工技術の開発概要。(右)月面環境での作業を想定した自律遠隔施工の実証実験(出所:JAXA Webサイト)

近年、日本の人手不足の状況に対応するため、建設機械の自動運転化技術の開発が進められており、複数種の建設機械を多数連携させるなど、世界でも有数の技術水準を達成している。そうした中で、鹿島建設も建設機械の自動運転を核とした次世代建設生産システムの構築に力を入れており、2009年からは「A4CSEL」(クワッドアクセル)の開発が進行中で、すでにダム工事を中心に多数の現場に適用されている。そして2016年からは、A4CSELをベースにJAXAや複数の大学と共同で、月面拠点建設の実現と地上での展開・活用を目的とした自動運転と遠隔操作による連携作業についての研究開発を実施している最中だ。
今回の国交省の事業では、これらの成果を発展させ、月面での建設作業を想定した研究開発を進めていくとのこと。具体的には、JAXAがまとめた国際宇宙探査シナリオ(案)で検討されている月面での推薬(推進剤・燃料)生成に向け、月の極域のクレーター内部などを含む永久陰(太陽光がほぼ当たらない極低温の領域)に氷の形で存在するとされる、水を含む砂の掘削(水掘削)を想定した作業を地上で実験するというものだ。
-
月面作業を想定した設定条件(出所:JAXA Webサイト)

その上で、地上実験で得られた成果を月面作業につなげるための要となる、地上と月面での動作の相違を調整する技術と手法を創出することが、今回の事業における共同研究の目的となるという。実機械を用いた今回の実験結果をもとに、仮想空間で精度よく作業を再現できる技術を構築し、月面作業をさまざまな条件で再現することが可能になれば、地上での実証成果を月面での作業に反映できると考えているとしている。
今回の実験では、JAXA相模原キャンパスを指令拠点とし、3台の自動・遠隔操作用に改造された建設機械(バックホウ2台、クローラダンプ1台)を広さ約2haの鹿島西湘実験フィールドに配置し、月での水掘削を想定した掘削・運搬作業シナリオに基づき、自動制御と遠隔操作のハイブリッド施工が実証された。
また今回は汎用の建設機械が用いられ、起伏や凹凸が少なく地盤性状が既知の環境であるなど、実際の月面環境とは異なる条件だったものの、自動運転と遠隔操作により上述した3台の建設機械が同時に稼働させられた点は大きな成果だという。
さらにLiDARを用いたSLAM技術により、周囲環境の地図作成および自己位置推定を同時に行いつつ、月面の永久陰領域などでの作業を想定したシナリオに沿っての実験も行われた。その結果、GPSなどに代表される衛星測位システム(GNSS)がなく、通信遅延が発生する環境であっても、複数の建設機械が土砂の掘削・運搬作業を効率的に行うことに成功したとのこと。これにより、月面の永久陰領域などでの作業に必要となる構成技術・要素技術の妥当性が確認できたとした。
-
実証実験での作業手順(出所:JAXA Webサイト)

3者は今後、今回の一連の作業を精緻に再現するシミュレータの開発を進め、実証実験で得られたデータや月面環境データを活用して、月面上での作業を模擬する段階につなげていく予定とする。
また、今回の実験で測位技術として活用されたSLAMは、地球上においても、GNSSが使用できないトンネルや地下工事の自動化に不可欠となる複数機械の同時かつ動的な測位技術として利用できる技術だといい、今回の活動で検証された精度向上策と共に、地球上の建設現場でもSLAMを活用していく方針だとしている。