自動運転向け測位には高度な技術統合が必要
|
|
|
画像4:Daniel Ammann氏 |
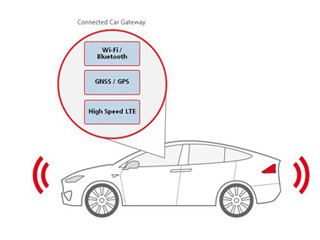
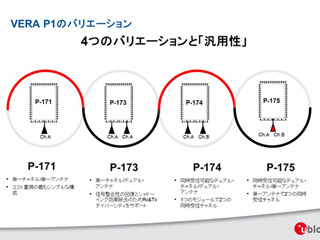
自動車向け無線通信は同社が特に力を入れている分野であり、今回の事業説明会でも車車間・路車間通信モジュール「VERA-P1」や車載LTEモジュール「TOBY-L4」といった新製品に関するプレゼンテーションがあった。
また、新製品の発表はなかったが、自動運転技術も、自動車関連で同社が注力している分野の1つである。これについては、u-blox共同創立者・エグゼクティブVPのDaniel Ammann氏から詳しい説明があった。
広義の自動運転には、人間による操縦運転をアシストする技術も含まれる。このレベルの技術については、同社の既存のGNSS製品と自動車用推定航法によってすでに実現可能となっている。
一方、人間がほとんどあるいはまったく運転に関与しない狭義の自動運転については、高速道路での運転アシスト、高速道路での全自動運転、ロボットタクシーなどによる一般道での自立走行といった段階が想定されており、後者になるほど自動化のレベルは上がる。これら高レベルの自動運転技術には、より高精度で信頼性の高い測位技術が不可欠で、たとえば高速道路での完全自動運転には誤差範囲数10cm以内に抑えた高精度の測位が要求される。その実現には現在開発中の次世代モジュールが必要とのことである。
次世代モジュールで具体的に要求されるのは、「マルチGNSS受信」「マルチバンド受信」「3D自動車用推定航法」「SSR補正データの使用」というGNSSの4つのコア技術の融合であるという。

|
|
画像5:完全自動運転向け次世代モジュールの要素技術(資料提供:u-blox) |
マルチGNSS受信、マルチバンド受信は、文字通り複数のGNSSデータ、複数の周波数帯を同時に利用して測位精度を高める技術である。推定航法は、加速度計やジャイロスコープなどのセンサのデータを使ってGNSSデータを補正するもので、都市部のビル陰や地下駐車場、トンネル内などGNSSの精度が落ちる(または利用できない)状況でも正確な測位を可能にする技術。3D自動車用推定航法の場合は、緯度経度に加えて、高さ方向の精密な位置情報も加えた推測を行う。SSRは空間状態表現(State Space Representation)と呼ばれる推定成分誤差表現法のことで、日本では準天頂衛星システム(みちびき)を使った測位補正データにSSR方式が使われる。
これらの中にはマルチGNSS受信などすでに実用化されているものも一部あるが、Ammann氏からは「4つの技術すべてに対応したモジュールの完成にはもう少し時間がかかる」との説明があった。ただし、現行のGNSSチップ(製品番号「8M」のシリーズ)の次世代にあたる自社開発チップについては、「順調に行けば今年の終わりくらいには発表できる」とのことだった。事業説明会では、開発中の次世代モジュールでは都市部での測位精度が大きく改善していることを示すため、同社の現行世代のADRモジュールやRTK(リアルタイムキネマティック)モジュールと測位誤差を比較したグラフが紹介されていた。

|
|
画像6:製品世代ごとの測位精度比較(資料提供:u-blox) |
車載製品では信頼性の確保が重要
車載用製品は当然、高温・極寒といった過酷な環境下での動作を保証する必要があり、製品の信頼性確保が特に重要視される分野である。新製品「VERA-P1」「TOBY-L4」についても、使用可能な温度範囲を広げることによってさらに信頼性を高めた点が強調されていた。車載半導体の技術を長年蓄積している同社ならではのコネクテッドカーへの取り組みであるといえる。
推測航法の信頼性に関していうと、自社のGNSS製品だけでなく、サードパーティのセンサデータを利用して測位データを補正しているため、最終的な測位精度はセンサの性能にも依存することになると考えられる。一般的にはセンサの精度は温度変化の影響を受けやすいため、推測航法の信頼性確保にはセンサの精度をどうやって確保するのかという問題もある。
この問題に関して、同社で扱っている推測航法には、GNSSモジュールを自動車のセンサに接続して使うタイプと、モジュール内に最初からセンサを組み込むタイプがあり、これらによって同社としての対応は異なる。前者は主にADR(automotive dead reckoning)で使われるものであり、GNSSモジュールは推測航法アプリケーション全体の1要素という位置づけになる。センサの信頼性についてはシステム全体の設計者によって確保される必要があり、同社としてはセンサの精度保証は管轄外の問題ということになる。
一方、後者のようなセンサ内蔵型モジュールは、主にUDR(untethered dead reckoning)すなわち車両との電気的接続を必要としないタイプの推測航法で使用されるもので、センサを含むパッケージとして同社が製品提供することになる。このため、サードパーティのセンサについても品質・性能を注意深く扱う必要がある。UDRは後付で推測航法を利用できるため、アフターマーケットでの展開が可能であるという強みがある。
UDRで使用するセンサについて、Seiler氏からは「センサのサプライヤとは緊密な連携をとっており、センサが正しい値を取るための境界条件の定義を特別に行っている。保証された温度範囲内でセンサのデータを厳密にどのように扱うかにはノウハウがあり、このノウハウは当社製品のソフトウェアアルゴリズムに実装されている。また、これらのセンサの品質評価は自社の信頼性ラボで徹底的に行っている」との説明があった。
同社本社ラボ内の信頼性評価設備については、今回、事業説明会と合わせてメディア向けに公開された。このラボの内部の様子は、写真が多いので改めて別記事でお伝えする。