日立製作所は3月18日、輸送インフラの高い安全性と運行効率を実現するというモビリティ管制基盤である「Digital Road」を開発したと発表した。今後、新技術をドローンなどのエア・モビリティの利便性向上に向けた「空の道」や安全性の高い離着陸管制システムに使用し、輸送インフラの安全な運行と自動化の推進につなげる。
-
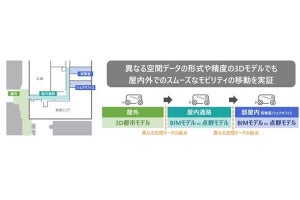
Digital Roadの概要

離着陸場周辺の環境因子を分析
同技術により、モビリティを自動および遠隔で運用する場合に、天候や電波状況などの経路環境の変化をリアルタイムに把握してデジタル空間内で管理できるようになる。その後の変化を事前に予測し、安全な移動経路を算出することで安定した運行を可能にする。これにより、日々の暮らしや被災地の復旧活動などで、より安全で効率的な自動運行を提供できるとのこと。
各種モビリティが安全かつ快適な運行に必要な多様な環境因子を予測し、各モビリティの移動を安全かつ効率の良い運行となるよう制御する。今回、最も環境因子の影響を受けやすく、これまで困難とされてきたエア・モビリティの離着陸の自動化に取り組んだ。
具体的には、変化する離着陸場周辺の環境因子(障害物情報、天候・風況、電波状態)をリアルタイムに捉え、その後の時間変化を予測してデジタル空間内に離着陸可能な最適航路を構築することで、より安全性の高い管制システムを提供する。
特に離着陸中の機体に対して、デジタル空間内で管理した各機体専用の占有領域や、遠隔操作に必要な運行プロファイルを提供し、離着陸経路の安全性と稼働率の向上を両立するとのことだ。
-
ドローンによる検証の様子

最短2分ごとに1機体の間隔で自動離着陸
同技術の効果は、市販のドローンを複数台用いて茨城県日立市の同社国分工場に設けた屋内の離着陸実験施設で検証した。
従来は離着陸時に目視による確認をしていた風況などの環境変化をリアルタイムで把握し予測することで、強風の合間など離着陸に適した時間帯や機体順序、移動経路を予め運行プロファイルとして提供できることに加え、機体の待機時間を低減しながら、最短2分ごとに1機体の間隔でスムーズに自動離着陸できることを確認したという。
なお、今回開発したのは環境因子の計測・システム統合技術、3次元都市モデルによる4次元情報統合・管理技術、安全経路を高速に算出するグラフ・ネットワーク技術、安全領域を確保する占有領域構築技術の4種類。
同社は同基盤をドローンを始めとする多様な自動化したモビリティへ適用するため、科学技術振興機構(JST)の経済安全保障重要技術育成プログラム(K Program)における研究開発構想の1つである「空域利用の安全性を高める複数の小型無人機等の自律制御・分散制御技術及び検知技術」で採択された研究開発課題に参画する予定であり、大規模なエア・モビリティの運用に不可欠な群制御に必要な技術を構築し、モノや人の移動・輸送の高安全化・効率化へ貢献するとしている。