科学技術振興機構(JST)と慶應義塾大学(慶應大)は7月11日、遠隔地に細やかな触感や存在感を伝えられる「テレイグジスタンス」技術を用いた、ヘッドマウントディスプレイ(HMD)やセンサで構成された利用者(マスター)用のコックピットと、アバターロボット(スレーブ)からなるシステム「(改良型)TELESAR V」を開発することに成功したと発表した(画像1・2)。装着者に布と紙の感触の違いまで伝えられるシステムは、世界でも初めてだという。
成果は、慶應大 大学院メディアデザイン研究科の舘暲(たち・すすむ)特任教授らの研究グループによるもの。研究は、JST課題達成型基礎研究の一環として行われた。今回開発された「TELESAR V」は、世界最高峰のCGとインタラクティブ技術の祭典「SIGGRAPH2012」のEmerging Technologies部門に採択され、現地時間2012年8月5日よりロサンゼルス・コンベンションセンターにて展示される予定だ。

|

|
|
画像1。テレイグジスタンスシステムのTELESAR V。左の操縦者が装備しているシステムがコックピットと呼ばれ、右のロボットはアバターロボットと呼ばれる |
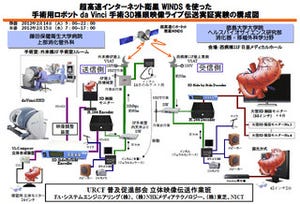
画像2。TELESAR Vのシステム構成 |
舘教授らは1980年よりテレイグジスタンスという概念を提唱し、感覚伝達技術の研究開発を進めてきた。テレイグジスタンスは、高い臨場感を持って自分がいる空間とは別の空間を体験できるだけではなく、逆に、自己の存在感を伝えることを可能とする、双方向のコミュニケーション技術である。
テレイグジスタンスは、これまで研究開発が進められてきた医療や災害、事故現場での利用にとどまらず、オフィスワークへの遠隔地からのロボットを介した参加や、病床の生徒の遠隔通学などの新規分野へも進出し、徐々に社会に根付き始めているところだ。
近年、グローバル化・高齢化・核家族化などの社会の変革に伴って、コミュニケーションを高度化するニーズが急速に高まっており、テレイグジスタンス技術の発展に大きな期待が寄せられている。
テレイグジスタンスの実現には、バーチャルリアリティ技術、ロボット技術、通信技術の高度な統合が不可欠だ。特に、人が実際に目の前の物を見たり触れたりした時に得られる感覚を、ロボットを通して本質的に正しく伝える必要がある。
加えて、ロボットの感覚情報を一方的に利用者に伝えるだけでなく、反対に利用者の身体の動きをロボット側で再現する必要がある。これを達成するため、人と同等のサイズ及び自由度を持つアバター(分身)ロボットと、人の動きを計測し感覚を提示するためのインタフェースの研究開発が、世界的にも進められているというわけだ。
アバターロボットの体が、自分の分身となったかのような一体感を持って自在に行動できるようにするためには、人とロボットとの間における視覚・聴覚・触覚などの感覚と運動の伝達を高い精度で同期させる必要がある。しかし、視聴覚に比べて触覚の伝達技術はいまだ発展途上にあり、一層の研究開発が求められている状況だ。
研究グループは2011年に、触覚を伝達するテレイグジスタンスシステム搭載のロボットシステム「TELESAR V」を2011年に発表し、遠隔地にいながらまるで目の前の物に直接触れているかのように感じられることを世界に先駆けて示した(記事はこちら)。
指先が押し込まれる力(押下力)と指先に加わる水平方向の力(せん断力)と物体表面の温度を伝えることに成功し、ユーザーは物を握ったときに指先に力を感じ、温もりや冷たさまでも感じられることを実証したのである。しかし、物体表面の細かな触感を伝えることまではできていなかった。
今回の研究では、新たに「触原色原理」を提案し、それに基づいて新規開発した圧覚・振動覚・温度覚を伝える触感伝達技術を「TELESAR V」に統合することにより、遠隔環境の細やかな触感を伝えるテレイグジスタンスに世界で初めて成功したのである。
アバターロボットの指先に搭載された触感を計測する触覚センサと(画像3)、操縦者の手に装着する手の詳細な運動を計測すると共に触感を提示するグローブ型の触覚ディスプレイ(画像4)が新たに開発された形だ。
触覚センサは、指先と物体との接触力を計測する圧力センサに加え、広い周波数帯域の振動を計測する音響式触感センサ、及び温度センサを内蔵している。また、触覚ディスプレイは、各要素を指の背や腹に分離して搭載することで、従来難しかった圧力・微細振動・温度の3要素の提示を実現した。これにより、布と紙などの物体表面の細やかな凹凸による触感を伝達できるようになった次第だ。

|

|
|
画像3。アバターロボットのハンド部。布と紙の違いも伝達できるようになった |
画像4。グローブ型触覚ディスプレイ。アバターロボットの指先がとらえた触覚データを再現し、布と紙の違いがわかるようになっている |
なお、今回のキーポイントとなる触原色原理だが、これは色が「赤・青・緑」の三原色の組み合わせで表現できるのと同様に、あらゆる皮膚感覚を「圧覚・低周波振動覚・高周波振動覚・皮膚伸び覚・冷覚・温覚・痛覚」といった7種類の感覚要素を運動と同期して組み合せることで、表現することが可能であるとする考え方で、研究グループによって命名された。
この原理を搭載したことにより、布と紙といった表面材質のほか、コップの内容物のようなダイナミックな感触も伝達可能となった(画像5・6)。

|

|
|
画像5。アバターロボットが布を触る様子。布と紙など、これまで判別がつかなかった表面材質の違いもとらえることができ、マスターに伝えることが可能 |
画像6。アバターロボットがコップからコップへ液体を移しているところ。表面材質の違いがわかるだけでなく、こうしたコップの内容物のようなダイナミックな感触も伝達可能だ |
今回の研究で開発された触感を伝えるテレイグジスタンス技術は、従来の高臨場感コミュニケーション技術で課題であった触覚情報の伝達に対して大きく貢献するとする。
高品質な触感を伝えることにより、手元の感覚に頼る必要がある作業を高精度に行うことや、対象が見えなくても触れただけで迅速な判断を行うことが可能となり、医療、製造、災害対応などの分野への貢献が期待できるという。
さらに、遠隔地の人や物に違和感なく触れられることで、見て聞くだけではない能動的で身体的な体験を提供できるようになり、遠隔体験や疑似体験がより豊かなものになる。
例えば、旅行の遠隔体験において現地に行かなければ分からなかった物の肌触りなど感性に訴えかける体験や、教育・訓練において「身体で覚える」ことなどコミュニケーション、エンターテイメント、教育、福祉、などの分野へも幅広く貢献することが期待されるとした(画像7・8)。

|

|
|
画像7。触覚が伝われるテレイグジスタンスの応用例として、遠隔ショッピングなどが考えられる |
画像8。そのほか、テレイグジスタンスはさまざまな用途への展開が考えられている |
なお、簡単ながら以下にスペックも掲載しておく。
コックピット(マスター)
- HMD解像度:1280×800ピクセル
アバターロボット(スレーブ)
- 自由度:54
- 頭部:3
- 胴部:5
- 腕部:7×2
- 手・指:16×2
- カメラ解像度:1920×1080ピクセル
- マイク:ステレオオーディオ