富士通研究所は11月17日、自動車のドライバ視界補助向けに車両全周囲を3次元的に、かつリアルタイムで表示する技術を開発したことを発表した。
|
|
|
富士通研究所のITS研究センター 主管研究員である山田浩氏 |
車載カメラは、ドライバの視界補助として期待されており、富士通研究所のITS研究センター 主管研究員である山田浩氏は、「ドライバの安心・安全運転を支援するため、車両周囲を確認する車載カメラシステムへの期待が国際的に高まっている」とし、米NHTSA(National Highway Traffic Safety Administration:道路交通局)でのバック事故に関するバックカメラの有効性報告の例をあげ、これにより、米国では2008年2月に自動車の後方視界を確保することを義務付ける法案「Cameron Gulbransen Kids and Cars Safety Act of 2007」が可決したことを示し、市場が成長していくとした。
なお、調査機関の調べによると、車載カメラの2007年市場は日本国内で400万台以上、海外46万台程度で、今後は海外を中心に市場が拡大するという。
従来の全周囲モニタを実現する車載カメラシステムは、前方のブラインド・コーナ・モニタ(BCM)、両サイドの側方モニタ、バックモニタの4つのカメラの映像を元に、車両全方向を上から俯瞰した形で表示するなど、2次元での表示であったり、視点・視線が異なる範囲で映像化されたりと、視界の情報が統合されずに、視界確認のための負荷が高いほか、シーンごとに映像が切り替わるため、瞬時の判断に遅れが生じるなどの課題があった。

|

|
|
従来のカメラシステムの映像化範囲と課題 |
|
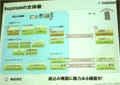
今回の技術は、4つのカメラによる周囲の路面映像を撮影するところは同じだが、それをFPGAで1枚の全周囲画像に変換、その後、富士通マイクロエレクトロニクスのカーナビ・ダッシュボード向けLSI「MB86R01」を用いて、仮想立体曲面に仮想投影し、見たい視点からの映像に変換、ユーザーは感覚的に見たい部分を立体的に切れ目なく表示することができるようになるというもの。

|
|
立体的に全周囲を映像化 |
なお、MB86R01は、CPUコアに333MHz動作の「ARM926EJ-S」とOpenGL ESに対応したグラフィックスエンジン(166MHz動作)を1チップに搭載したシステムLSIで、これを用いることで、映像処理時間30msを実現した。

|

|
|
駐車場での後方確認時の画像(路面の白線などもカメラからの情報を補正なしで表示している。ちなみにクリアに表示できる距離としては20~30m程度とのことで、それより遠くになるとぼやけてくる) |
|

|

|
|
実際の道路上でのサイドビューモニタ(左)と全周囲映像(右)(隣の車線でトラックが抜けていくのがモニタ上でわかる) |
|
山田氏は、同処理時間について、「アルゴリズムの見直しを図り、コンパクト化および軽量化を図ったことにより実現した」と語る。
これにより、リアルタイムで、全周囲を立体的に表示することが可能となり、周囲の状況を1つの映像として一覧できるようになるほか、シーンに応じて、見たいところを見やすい視点から見ることによる安心感・安全性の向上や、どこから見た映像か直感的に把握することが可能となることによるドライバの映像認知性の向上などが図れるという。

|
|
各カメラの情報を1枚につなぎ合わせた後、画像処理で立体曲面に加工する |
なお、同研究所では、まだ技術的な段階をクリアしたに過ぎないとしていながらも、今後は視界補助に対する効果検証を進め、自動車向け映像ソリューションとして、製品展開を検討し、2~3年程度で製品化できれば、としている。

|
|
今回の実証実験で使用したボード。FPGAはAlteraの「Stratix II」を使用し、右側の画像入力部から送られてきた4枚の画像を1枚に統合、システムLSIである「MB86R01」に転送、仮想曲面に展開する |