ヒト型ロボットを用いたレスキューコンテスト
去る11月4日に大阪電気通信大学駅前キャンパスにおいて、今年で4回目となる「電通大杯 ヒト型レスキューロボットコンテスト2012(ヒト型レスコン)」が開催された。その模様をお届けする。
ヒト型レスコンはヒト型ロボットによる災害救助をテーマにしたロボットコンテストで、今年もさまざまな趣向を凝らしたヒト型ロボットが参加した。その数は13体(画像1)。観客には小さな子ども連れの家族も多く、愛くるしい動きのロボットに「がんばれー」と声援が送られていた。

|
|
画像1。ヒト型レスコン2012開催を記念した集合写真 |
レスキューロボットといえば、クローラ型のロボットを想像してしまう方も多いことだろう。しかし、このコンテストはヒト型ロボットによる災害救助をテーマにしており、ロボットを遠隔操縦して、約4m×2mのフィールド内で「トンネルくぐり」「段差乗り越え」「ガレキ除去」「要救助者搬送」の4つのタスクを順にクリアしていき、その時間の短さを競う(制限時間は6分)。
ヒト型レスコンの本家である「レスキューロボットコンテスト(レスコン)」は、コンテストを通して災害やレスキューロボットに対する技術や考え方を学ぶことで、将来には災害に強い世の中になることを目指して、2000年より毎年開催されている。
本家レスコンでは10人ほどで構成されるチームと複数台のロボットを用いて競技を行うのに対して、もう少し規模を小さくして1人からでも気軽に参加できるようにと、2009年からスタートしたのがヒト型レスコンである。
レスコンは被災地を模したフィールドで要救助者役のデッサン人形を遠隔操縦のロボットで救助する。ただし、単に人形を早く拾い上げゴールラインに向かえばいいというものではなく、要救助者を「安全に」扱えているか、「やさしく」救助できているかといったことも本家同様に審査対象となり、採点されるのが特徴だ。
ヒト型レスコンのフィールドは、操縦者を囲うようにコの字にコースが作られ、全面に薄いパンチカーペットが敷かれている。そこへトンネルや段差などの障害物が置かれており、ロボットを遠隔操縦してこれらを突破して要救助者を模した人形を救出した後にゴールへ搬送するという流れだ(画像2~4)。

|

|
|
画像2。フィールド全体図。左側からスタートし障害物を突破して要救助者を助けた後に右奥のゴールを目指す |
画像3。フィールドの図面 |

|
|
画像4。発泡スチロール製のガレキで囲まれているのが、要救助者を模したデッサン人形 |
簡単そうに見えて、2足歩行ロボットには厳しいコース
コースは一見すると簡単そうに見えるが、2足歩行ロボットでこれらを踏破していくことはなかなかに難しい。金属でできたロボットにとって、5mmに満たないパンチカーペットでも足がマットに沈み込み転倒してしまうことが多い。
クローラ型のロボットと違い重心位置が高く、接地面積の小さい2足歩行ロボットは倒れないようにするだけでも難しいのである。さながら本当に倒壊した建物のガレキの上を歩くような難しさだ。
競技は操縦者が要救助者を模した人形を配置するところから始まる。フィールド内に指定された黄色の枠内であれば人形の位置とポーズは操縦者が自由に決めることが可能だ(画像5)。

|
|
画像5。人形のポーズは操縦者が決めることができる。その後に審判がランダムにガレキを配置する |
2011年大会からの違いとしては、今年は要救助者人形のポーズに制限が加わった。人形の腰部分のパーツが床面と接していないといけなくなったのだ。それはどういうことかというと、人形はなるべく高い位置にあったり、下に隙間があったりした方が救助しやい。そのため、制限のなかった昨年までは四つん這いはまだしも、ブリッジなど、要救助者のはずが不自然なポーズが見られた。
それを、今年からはその手法が使えなくなり、実際の要救助者が意識的にしろ無意識的にしろ取るであろうポーズとなったのである(それでもまだエビ反っていたりと無理なポーズはどうしてもあるのだが)。位置がより低く、かつ地面との隙間が小さくなったことで難易度が上がったというわけだ。
競技者が人形を配置した後、審判によってガレキが配置される。ガレキの配置位置は事前にはわからないため、さまざまなガレキの状況を予測した戦略が求められる具合だ。
ロボットごとに異なるレスキュー方法
そして、いよいよレスキュー活動開始。最初の障害として待ち構えるのがトンネルくぐりだ。腕を使っての匍匐(ほふく)前進したり、仰向けになって足で前進したりと、ロボットによって方法はさまざまである(画像6・7)。
興味深い方法を使ったのは、「大電通コマドリ-改」(中村介氏/大阪電気通信大 自由工房)だ。台車を用いて、その上に仰向けに寝そべり巧みに足を動かすことで前進しトンネルを通過した(画像8)。
これはルール上何の問題もなく、ヒト型レスコンの特長の1つで、道具を用いての救助活動を行うことができる。例えば、踏み台を使って段差を登ったり、担架のようなものを用いて救助者を搬送したりといったことも問題ない。しかも、こうした道具に関するアイディアも採点対象である。

|

|
|
画像6。匍匐前進でトンネルを進むブラス(コシグチ氏/九州工業大学) |
画像7。足から進んでトンネルを抜けるCREA(ポン太氏/大阪電気通信大 自由工房ヒト型ロボットプロジェクト) |

|
|
画像8。台車を使って移動する大電通コマドリ-改 |
次に待ち構えるのが段差乗り越えだ。段差はアクリル製でできており、うまく登らなければツルツルと滑ってしまう。ロボットの身長の半分ほどもある段差を超えるのは、人間のように柔軟に動くけない構造のロボットにとっては、至難の業だ(画像8~12)。

|

|
|
画像9。腕をついてクルッと後転して段差を超えるブラス |
画像10。回転後に見事に着地も決め観客を沸かせた |

|

|
|
画像11。まるでヒトのように1歩ずつ段差を登るレスキュリオン(岩機氏/ロボットフォース) |
画像12。アクロバッティックに前転で段差を超えるあすらRC+(荒柴 祥太氏/大阪電気通信大自由工房) |

|
|
画像13。台の上でまわり足から降りる銀虎(播田 将樹氏/大阪工業大学)降りる時もロボットの安全を考えている |
続いて待つのは、人形の周りにあるガレキの除去作業。ガレキを黄色の枠の外へ除去しなければならない。ガレキを抱えて放り投げても、手や足で弾き出してもいい。注意しないといけないのが、人形の上にガレキを落としたり、ロボットの手や足で人形にダメージを与えたりしてはならないこと。要救助者に気を配りながらやさしくガレキを取り除くことが重要なのだ(画像14~16)。
万が一、要救助者にガレキをぶつけたり、ロボットが倒れこんだりするような危険行為をしてしまった場合にはイエローカードが出され、3枚貰うと失格である(画像17)。

|

|
|
画像14。勢いよくガレキを投げるエストノート(テラオ氏/産業技術短期大学) |
画像15。勢いよくガレキを弾き出すostwind(ラル氏/大阪電気通信大学 自由工房) |

|

|
|
画像16。両手で慎重にガレキを除去する大電通コマドリ-改 |
画像17。ガレキをうっかりダミー人形に落としてしまった! |
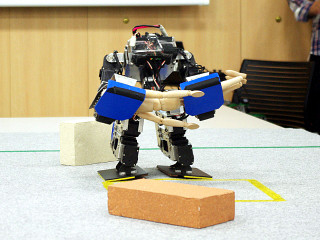
ガレキの除去が終わったら、いよいよ人形を抱え上げ、ゴールへと搬送する。後ろから抱え上げるたり、お姫様抱っこしたりと方法はさまざまだが、本当の要救助者と考えて、やさしく扱うことが重要なのはいうまでもない(画像18~21)。
要救助者を抱えた後はゴールラインを目指す。競技は人形がゴールラインを越えたところで終了するが、RB2000SFは人形をやさしく下ろすところまでモーションを作りこんでいた。競技ルールにとらわれず、競技者独自のレスキューに対する意気込みを見られることもレスコンの魅力である(画像22)。

|

|
|
画像18。後ろから抱え上げるブラス、頭が上になった方が辛くないだろうという配慮だ |
画像19。股関節を180度ひらき、体勢を十分低くして横から抱えるように救助するあすらRC+ |

|

|
|
画像20。片ヒザをつき、人形を前から抱え起こすように救助が行われたフレイア(羽柴 昂志氏/姫路ソフトワークス・大阪工業大学) |
画像21。ヒザをついて、姿勢を低くし、やさしくダミーを抱え上げるRB2000SF(zeno氏) |

|
|
画像22。競技終了後に要救助者をやさしく下ろすRB2000SF |
ここでレスキュー活動は終了だ。ヒト型レスコンはファーストミッションとファイナル・ミッションに分かれており、ファーストミッションで高得点を収めた上位6名はファイナル・ミッションに進むことが可能だ。
高得点を狙えるカメラのみによるロボット操作
ファイナル・ミッションではロボットに搭載されたカメラだけを頼りに競技に挑戦することもできる。カメラだけで競技することを事前申告することで、制限時間が3分延長されて9分間になる形だ。救出を終えた時の残り時間は評価に加算されるため、競技難易度を上げる代わりに高得点を狙うことができるのである。
得点が増えるメリットはあるものの、カメラのみによる操縦はかなり難しいのはいうまでもない。搭載カメラを使用しての操縦で難しい要因の1つとなるのがロボットの状態を把握しきれないことだ。
カメラによる遠隔操縦に挑戦したあすらRC+には、2台のカメラが搭載されていた(画像23)。1つは肩部に取り付けた可動式の俯瞰カメラで、カメラを動かすことで前方の障害物や足元の要救助者を確認することができる(画像24-26)。
もう1つは腰に取り付けた固定カメラで、こちらは予備のカメラだという。通常は肩のカメラで救助作業を行うが、それが故障した場合などはPCからの操作で腰のカメラに切り替えて操作することができるようになっている。
なお、説明するまでもないが、カメラからの映像は視野がとても狭く、遠距離感や方向感覚もない。写し出されるカメラ映像だけでの救出活動はやはり困難で、残念ながらあすらRC+要救助者を抱え上げたところで制限時間を終了してしまった。
また、カメラによる遠隔操縦の場合、観客からの声援も操縦のヒントになってしまうため、「落ちそう!」といった助言を出すこともならない。あすらRC+はあと1歩でフィールドから転落してしまいそうな場面もあったため、会場は息を呑んで競技を見守った(画像27)。

|

|
|
画像23。肩と腰にカメラを取り付けている、肩のカメラは可動式だ |
画像24。カメラを前に倒して、救助者の位置を確認する |

|

|
|
画像25。肩につけたカメラの映像。視野が狭く要救助者の確認も困難だ |
画像26。うまく要救助者をしっかりと抱え上げた、後はゴールを目指すだけ |

|
|
画像27。あと1歩で落ちてしまいそう! 足元が見えないので操縦がとても難しい |
無事に全競技が終了し、結果は3分台という圧倒的な早さで救出活動を終えたBR2000SFが1位に輝いた。救出活動の早さはもとより、要救助者をやさしく扱う点においても審査員から高評価を得た(画像28~30)。

|

|
|
画像28。優勝はzeno氏の操縦するロボット「RB2000SF」(画像2) |
画像29。優勝したRB2000SF(中央)と、準優勝のブラス(右)、3位のあすらRC+(左) |

|
|
画像30。技術賞を獲得したフレイア(左)と奨励賞を獲得したエストノート(右) |
競技が終わった後、審査委員長である横小路先生は「ヒト型レスコンがもっと発展し、いつかは本家レスコンと結びついて、クローラ型のロボットから、ヒト型ロボットが降りてきて救助を行う」そんな未来を見てみたいとコメント。
実行委員長の升谷先生は「今回、救助に成功したロボットは2体で、救助できれば入賞できる状態だった。来年からはさらにレベルが上がり、多くのロボットが迅速かつ安全に救助活動を完了し、その中で誰の救助が1番良かったか、そういうのを競えるようになってほしい」とコメントした。
競技全体を見て特に印象的だったのは、会場が終始明るい雰囲気であったことだ。ヒト型になることで愛着心が愛着心が湧くためか、熱心にロボットを応援する小さな子どもたちが多く見られた。司会と解説者のトークも明るく弾み、とても楽しいコンテストとなった。
今はこうして小さなロボットが競技を行う段階であるが、今日、目を輝かせてロボットを応援した子どもたちが大きくなる頃には、災害にあった私たちをどこからともなくロボットが駆けつけてくれる、そんな未来を期待したい。
なお、1位のRB2000SF、準優勝のブラス、3位のあすらRC+の動画を見ることも可能だ。