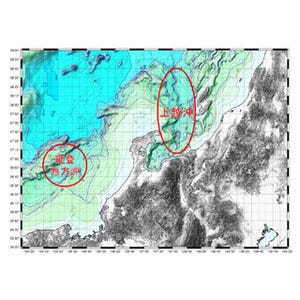
東京大学生産技術研究所(東大生研)、九州工業大学(九工大)、水産総合研究センター(水研センター)の3者は6月19日、東大生研が開発した自律型海中(水中)ロボット「ツナサンド(TUNA-SAND)」をオホーツク海の紋別沖合の北見大和堆にて展開し、150~1000mの海底に棲息する高級魚「キチジ」とその棲息環境を撮影し、高い精度でその資源量を推定することに成功したと発表した。
成果は、東大生研附属海中工学国際研究センターの浅田昭教授、同・永橋賢司特任研究員、同・西田祐也特任研究員、九州工業大学社会ロボット具現化センターの浦環 センター長(特任教授)、水産総合研究センター北海道区水産研究所の濱津友紀主任研究員らの共同研究チームによるもの。
キンキ、メンメとも呼ばれるキチジはカサゴ目フサカサゴ科の魚で、資源量が減少していることが知られている。群れを形成せず、海底でほとんど動かないキチジの分布・資源量の調査研究においては、着底トロールによって直接捕獲しての漁獲高から推定するのが一般的だ。
しかし、起伏の多い複雑な地形の海底では困難な作業であり、分布域全体をカバーしたトロール調査は多大な作業時間や経費を要すること、キチジの棲息環境を乱すことなど問題も多い。かつては有人潜水艇を用いての調査も行われたが、有人潜水艇の利用は極めて困難で、現在は行われていない。
そのため、キチジの実際の棲息状況を視覚的に調査できる新しい手法として着目されたのが、ケーブルのついていない自律型海中ロボット(AUV:Autonomous Underwater Vehicle)である。AUVを使って一定の高度から海底面の撮影を実施し、コンピュータでモザイク処理して海底の広域を一枚の映像としてとらえて、キチジの詳細な分布を求め、資源量推定を行うことが期待されているというわけだ。
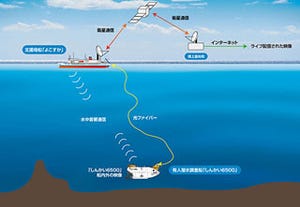
そこで今回の三者が協力して、浦センター長が東大生研の教授として研究室を構えていた時代に開発したツナサンドをオホーツク海の北見大和堆にて展開させ、キチジとその棲息環境を調査するというミッションに臨んだのである。ツナサンドは、全長1.1m×全幅0.7m×全高0.71m(アンテナ部を除く)、空中重量約240kgの小型ホバリング型のAUVだ。最大潜航深度1500m、潜航時間約8時間、毎秒数10cmの速度で移動して海底の写真を撮影することができる。またその運用に関しては大型ウインチや大型漁具を必要としない点、そして海底の生物たちに影響を与えず調査できるという点も特徴だ。
ツナサンドの潜航箇所は北見大和堆の水深150mから1050mの5地点で、延べ18時45分にわたる調査が行われた。約6000枚の海底写真が全自動で撮影され、全長約9cmから約34cmのキチジ37尾の撮影に成功。そして得られた写真を地形に沿った形でつなぎ合わせてひと続きの写真とし、キチジの分布、体長を計測し、資源量の推定したところ、密度が最も高いところでは、約250尾/haと計算された。しかし、同時に棲息がまったく確認されない箇所もあったという。
今回のAUVを使ったキチジ調査の成功は、水産資源量を推定する新たな手法をもたらした形だ。キチジのより広域の調査や、ほかの魚種の調査へと観測を広げることもでき、底生水産資源調査の推定精度の向上および調査海域の拡大が期待されるとしている。

|
|
画像1。ツナサンド |