宇宙航空研究開発機構(JAXA)は12月24日、小惑星探査機「はやぶさ2」が同月3日に実施した地球スイングバイについて、結果の詳細を報告した。すでに、地球スイングバイが成功だったことは14日のプレスリリースで公表されていたが、今回、誤差300mという高い精度で軌道誘導できていたことなどが明らかになった。

|

|
|
スイングバイをするはやぶさ2の想像図 (C)池下章裕氏/JAXA |
報告するJAXAの津田雄一・はやぶさ2プロジェクトマネージャ(中央) |
地球スイングバイは、地球の重力と公転を利用して、探査機を加速/減速させる技術である。燃料を使わずに加速/減速できるというメリットがあるが、目的の軌道に乗せるためには、極めて正確に探査機を誘導して、正しいルートを飛ばす必要がある。進入時の誤差が大きいと、軌道の誤差が大きくなり、修正のための燃料消費量が増えてしまう。
はやぶさ2は、化学エンジン(RCS)を使った軌道修正を2回実施した。1回目(TCM1)は11月3日で、噴射時間は合計3.95秒。これで軌道の誤差を400kmから11kmへと縮小させた。さらに、11月26日の2回目(TCM2)で0.80秒の噴射を行い、この結果、誤差は11kmから3kmまで小さくなった。

|

|
|
地球スイングバイ前後の主な運用 (C)JAXA |
軌道修正の概要。計3回実施した (C)JAXA |
TCM1に先立ち、9月1日~2日には、イオンエンジンを使った軌道修正(IES-TCM)も実施していた。ここでイオンエンジンを使ったのは、RCSの燃料消費を少しでも抑えるためだ。RCSは小惑星に到着後、タッチダウンなどで使用する。未踏の小惑星では、何が起こるか分からない。燃料さえあれば自由度は増すので、少しでも節約しておきたいのだ。
JAXAは当初、12月1日に3回目(TCM3)を実施する予定であったが、11月30日に軌道を推定したところ、TCM2までで十分な精度を達成できたことが分かり、TCM3はキャンセル。津田雄一・はやぶさ2プロジェクトマネージャによれば、「30km以内なら成功と見ていた」とのことで、3kmの誤差であれば、イオンエンジンの燃料消費もほとんど増えない。

|
|
的の中心を通るよう軌道修正する。誤差30km以内なら成功 (C)JAXA |
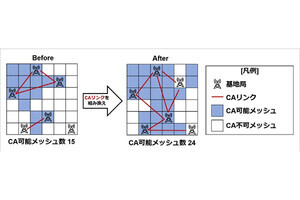
TCM3をキャンセルしたことで、JAXAは誘導目標点を変更、当初の的の中心から、3km離れたTCM2後の予測点を新ターゲットに設定した。スイングバイ後に軌道を正確に解析したところ、実際にはやぶさ2が通過したのは、そこから300mほど離れた地点だった。これにより、JAXAは「最終的な軌道誘導精度は300mだった」と結論付けた。

|
|
目標地点を赤から青に変更した。実際に通ったのは緑 (C)JAXA |
「当初の目標地点から3km離れているんだから、軌道誘導の精度は3kmでは?」と思うかもしれないが、もし12月1日にTCM3を実施していたら、ほぼ同程度の精度で、的の中心近くを通過することが可能だったと見られている。上記の「精度は300m」には、そういう意味があるのだ。
本来は30kmの精度でも良かったので、地球スイングバイだけを考えれば、そこまで高い精度を狙う必要は無かった。しかし地球帰還時、大切な小惑星のサンプルが入ったカプセルを分離するときには、やはり高い精度の軌道誘導が必要になる。今回は、そのリハーサルとしても考えられており、十分な能力があることを実証できた形だ。
また、地球スイングバイの前後には、はやぶさ2に搭載された観測機器による試験撮影なども行われた。宇宙空間を航行中は、何を撮影しても点にしかならないのだが、地球や月を近くから撮影すれば、機器の健全性を確認できる。地球スイングバイは、小惑星到着前にそれができる、唯一の貴重な機会でもある。
はやぶさ2は基本的に、太陽電池パドルを太陽に向けた「巡航姿勢」で飛行している。一方、観測機器の多くは底面側に配置されているため、地球を観測するためには底面側を地球に向けた「観測姿勢」にする必要がある。スイングバイ前は、両者の差が大きく、かなり姿勢を振らないといけなかったが、日々姿勢を切り替えることで対応した。
この姿勢制御には、リアクションホイールとRCSを併用した。RCSでは偶力噴射を行うことで、軌道は変えずに姿勢だけを変えるようにするが、スラスタにバラツキがあるため、どうしても横方向の微小な推力が発生してしまう。これが軌道の誤差の原因になるため、軌道への影響を評価しながら慎重に運用を行ったという。
スイングバイ後は、巡航姿勢との差が小さくなるため、観測姿勢を維持しながら、観測に注力。そして12月22日に巡航姿勢に戻し、一連のスイングバイ運用を完了した。この結果、4つ全ての観測機器に対し、問題無いことが確認できた。

|

|
|
「光学航法カメラ(ONC)」による撮影画像 (C)JAXA |
「中間赤外カメラ(TIR)」による撮影画像 (C)JAXA |

|

|
|
「近赤外線分光計(NIRS3)」による観測結果 (C)JAXA |
「レーザー高度計(LIDAR)」のキャリブレーションも実施 (C)JAXA |
今後は、いよいよ小惑星リュウグウへ向け、イオンエンジンの本格的な運転が開始されることになる。今までの稼働時間は累計600時間程度だが、これからは約7,000時間(約292日分)も動かさないと、リュウグウに到着することができない。津田プロマネは「緊張を強いられる運用になる」と、今から気を引き締めた。
初号機では、イオンエンジンやリアクションホイールに不具合が出てしまったが、今のところ、はやぶさ2の機器は全て順調だ。イオンエンジンの運転は2016年3月~4月から開始する予定で、津田プロマネは「我々には初号機の経験があるものの、はやぶさ2もまだ挑戦。日々起きることをハラハラドキドキしながら見守って欲しい」と呼びかけた。

|
|
今後の予定。イオンエンジンの運転は大きく3回に分けて実施する |