ロボットゆうえんち/MANOI企画は1月21日、近藤科学が運営するロボットショップKONDO ROBOSPOTにて、ホビー向け2足歩行ロボットの完成・調整済みモデル「KONDO KHR-3HV コンプリート ROBO-ONEカスタム」(ROBO-ONEカスタム)の発表会を行った(画像1)。また、同時にロボットゆうえんちで実施しているロボット競技会「ロボット・アスリートCUP」の新競技に関する説明会も実施。今回はその模様をお届けする。

|
|
画像1。「KONDO KHR-3HV コンプリート ROBO-ONEカスタム」。ベースの近藤科学製「KHR-3HV」よりも腰が落とされており、身長は2cmほど低い |
ROBO-ONE Lightで勝つために生み出されたロボット
ROBO-ONEカスタムは、国内のバトル系2足歩行ロボットの競技会では最高峰のROBO-ONEの中の、市販機もしくは1kg以下(U1K)級の自作機が参加できる「ROBO-ONE Light」で優勝を狙うために開発された、ロボットゆうえんちのフラッグシップともいえる機体だ。近藤科学の2足歩行ロボットキット「KHR-3HV」(パーツカラーは純正オプションのブラックを使用)をベースにした、近藤科学およびROBO-ONE公認のフルコンプリートモデルである。
これまで、ROBO-ONE Lightには、マイナビニュースでは宇宙系の記事を中心に活躍されているライターの大塚実氏らがKHR-3HVでもって複数回参戦し、惜しくも同氏は準優勝を記録しているが、2012年1月時点では優勝を成し遂げていない。
そこで、ロボットゆうえんちを主催し、MANOI企画代表取締役の岡本正行氏が企画、新進気鋭の若手ロボットビルダーとして知られるライトフット代表の柴田善広氏がオリジナルパーツの設計と製作、機体の組み立てと調整を担当し、大塚氏がスーパーバイザーとして、本気でROBO-ONE Lightを制覇しようという意図で開発されたのが、このROBO-ONEカスタムである。

|

|
|
画像2。ロボットゆうえんち主催/MANOI企画代表取締役の岡本正行氏。京商から販売されているホビー向け2足歩行ロボット「MANOI」の開発を指揮した人物で、京商から独立した現在は子どもや若者の理科離れを食い止めようと、ロボットゆうえんちで日夜奮闘している |
画像3。ライトフット代表の柴田善広氏。ROBO-ONEカスタムのオリジナルパーツはスーパーバイザーである大塚氏の監修のもとに柴田氏が設計した。そして、機体の組み立てと調整、モーション作成も柴田氏が担当。ROBO-ONEカスタムは柴田氏の職人芸によるカスタムメイドの機体なのだ |

|
|
画像4。マイナビニュースでは宇宙開発系の記事を中心に、ロボット系の記事も執筆している大塚実氏。スーパーバイザーとして監修に当たり、オリジナルパーツの形状の監修や、モーション作成を柴田氏と共に行う |
ROBO-ONEカスタムの特徴は、まず軸数(関節駆動用のモータの数)はKHR-3HVのままで17軸。ただし、頭部を動かすための首の軸は外され、代わりに腰に1軸を追加。腰が回転することでパンチのリーチが増し(画像5)、戦闘力がアップしている。現在のROBO-ONEでは、この腰の入ったパンチは非常に重要で、優勝を狙うには必須ともいえる改造だ。
そして、そのパンチの攻撃力をさらにアップしているのが、ロボットゆうえんちオリジナル設計のナックルガード(画像6)。ノーマルの場合、手先がコブシになっているため、相手にヒットしても力が若干逃げてしまったり、相手の機体の一部に引っ掛けるといったことができなかったりする弱点があったのだが、ナックルガードによってそれらを改善。これまた非常に戦闘力が増したというわけだ。ナックルガードは大塚氏がこれまでのバトルの中で感じていたものを解消するために提案したとのことで、設計の監修を大塚氏が行っている。

|

|
|
画像5。腰に1軸追加されたことで、パンチのリーチと威力が増した |
画像6。ナックルガード。ノーマルはコブシと比べてリーチが増し、パンチの威力を伝えやすく、なおかつ相手の機体に引っ掛けやすくなった(パンチを当てやすく、また投げ技も決めやすくなったということ) |
通常の3倍の速度と感じるほどに機動性が向上!
さらに、機動力と歩行時の安定感もアップ。ノーマルのKHR-3HVは市販機としてはかなり戦闘力のある機体だが、もちろん改善すべき部分もあり、その数少ない弱点ともいえる部分の1つが、激しい動きをした時に、バランスを崩しやすい点だ。そこで、足首のフレームの構成をロボットゆうえんちオリジナルの固定アングルなどに変更。結果、歩行動作の安定性が増し、さらに攻撃姿勢や防御姿勢から通常姿勢への復帰が早くなったというわけだ(画像7・8)。

|

|
|
画像7。ROBO-ONEカスタムの足首周り。これにより倒れにくくなり、また歩行時が安定しているのでより高速で動ける |
画像8。ノーマルのKHR-3HVの足首周り。フレームの形状が大きく異なるのがわかるはず |
この歩行時の安定性が増したことによって、横方向の移動速度が目に見えて速くなっており、大げさに聞こえるかも知れないが、反射神経が追いつかなくなりそうなほど(画像7・動画1)。リング際で左右を間違えて移動させたら、あっという間に転落するのは確実という速度である。

|
|
|||
|
|
実際に操縦した大塚氏によれば「リングが狭く感じる」ほどだという。おそらく、ノーマルの機体のユーザーが見たら驚くこと間違いなく、まさに別物の機体と思うほどの速度になっているはずである。しかも、素晴らしいのがそれだけの高速移動を行った後にストップしても、そうそう倒れないことだ。左右に激しく行ったり来たりすればさすがに多少はバランスを崩すが、同じ速度でノーマルの機体が左右方向に移動したら、まず倒れてしまうはずである。
ちなみに、ROBO-ONE Lightは、本大会のROBO-ONEに比べればその下のクラス(Jリーグでいえば、ROBO-ONEがJ1で、ROBO-ONE LightがJ2的なポジション)なのだが、それでも準決勝から上の対決ともなると、オペレーターの技量も高い上に機体の性能も高くなってくるので、相手の攻撃をかわしてその直後にカウンター的に攻撃を仕掛けるといった、絶妙なポジション取りが必要で、そのためにはまさに機動力が重要。大幅な戦力アップといえよう。
また股関節部分は、近藤科学純正のオプションパーツの開脚フレームを採用。近年のバトルではお馴染みのしゃがんでの防御姿勢を取れるようになっている。また、180度開脚はバトルでは使わないが、ロボットサッカーにおけるキーパーなども対応できる具合だ。

|

|
|
画像10。股関節部分は近藤科学純正の180度開脚オプションパーツを採用。それにより防御姿勢を取れるようになった |
画像11。防御姿勢。相手の攻撃を受け止める必要があるため、重心を下げて安定感を上げる必要があり、足を開く必要があることから、180度開脚オプションパーツが必要なのだ |

|
|
画像12。180度開脚。バトルではここまで開くことはないが、サッカーのキーパーを担当した場合は、180度開脚は必須だ |
また、ロボットゆうえんち/MANOI企画で販売している「KONDO KHR-3HV コンプリートセット」に採用されている、オリジナルの「モード切り替えスイッチ」も搭載。バトルとサッカー、パフォーマンスといったアクションのまったく異なる動きを2系統登録でき、いちいち切り替えるためにモーションの設定のし直しといった作業を行わなくて済むようになっている。もちろん、相手のサイズや重量などに合わせて2通りのバトルモーションを用意しておき、それを切り替えるといった使い方も可能だ。

|
|
画像13。胸カバーを外すと、右側にあるトグルスイッチがモード切り替えスイッチ。出荷時はバトルで必要なモーションのみを用意したバトルモードと、そのほかのノーマルモードを用意。もちろん、モーションはユーザーの手で変更が可能 |
さらに、バイザー(目)に赤と青の2色LEDを搭載しており、モードによって色が変わるようになっている(標準仕様で、赤がバトル、青がノーマル)。さらに、バッテリー電圧低下時にはLEDが点滅して警告してくれ、さらにギリギリになると2色を使って点滅するので、バッテリーを傷めずに済むというわけだ。

|

|
|
画像14。目の部分に備えられたLEDが赤の時はバトルモード |
画像15。ノーマルモードの青。もちろん、サッカー用モーションを入れてもいいし、相手の体格差に合わせた別の攻撃モーションを入れたバトルモーションその2を入れてもいい |
そのほか、ROBO-ONEでのバトルという過酷な使用に耐えられるよう、純正アルミフレームのメスねじ部分を圧入ナットで強化している。
バトルのモーションに関しては、大塚氏と自身も豊富なバトルの参加経験を持つ柴田氏が作成を行い、標準搭載されているほか、ロボットゆうえんちの公式サイトから新モーションのダウンロードも計画している。一般的なコントローラのボタン数の関係から、16モーションが搭載される予定だ。なお、使い方が難しい場合は採用しないが、モーション途中で終了させるキャンセルモーションも入れるかも知れないという。
大塚氏は、「アドバイスしたものはほぼ入っているので、期待できると思います。また、あまり強すぎる機体になってしまっても面白くないので、そこら辺のバランスがいいです。ROBO-ONE Lightは、現行のルールだとU1Kの機体が強いので彼らがライバルになるかと思いますが、優勝を目指して頑張ります」とコメントしている。
価格は27万3000円(税込)で、受注受付は2月から(正式な日程は後日発表)。通常は受注生産で納品まで3週間ほどかかるが、ROBO-ONEが3月開催のため、それよりも早く納品できるようにするとしている。受注は、ロボットゆうえんちの公式サイトのほか、各ロボットショップまで。
イメージとしては、「通常の3倍!」とまではいかないにしても、横移動は速すぎると感じるほどで、しかも確実に攻撃力も防御力も上がっているので、使いこなせれば間違いなくROBO-ONE Lightなら上位に進出できるはずだ。経験を積んだオペレーターが使えば、優勝も不可能ではないだろう。
ROBO-ONEに出てみたいけど、組み立てるのに技術がない・時間がない、調整やモーション作成などの技術や知識がない、などといったことから参加を断念していた人は、本機を購入して、台風の目となって暴れてみてはいかがだろうか。
多脚ロボットによる新競技を計画する「アスリートCUP」
そして、ROBO-ONEカスタムの発表会に続いて行われたのが、アスリートCUPの新競技について。アスリートCUPは、1月29日(日)に横浜市磯子区のはまぎんこども宇宙科学館で最新の大会が行われる予定だが、今回発表された新競技は、ゴールデンウィークに予定している次々回大会「ロボット・アスリートCUP2012」から実施される計画だ。
アスリートCUPの参加者は、現在、社会人と大学生が半々といった形だが、主催者の岡本氏はそれをさらに下の年齢、つまり高校生や中学生が参加できるようにと考えている。そのために必要なのが、多脚ロボットによる競技だ。多脚ロボットとは、市販品では近藤科学の「カメ型ロボット」シリーズや、「KMR-6」、「KMR-P4」といた4脚以上(4脚もしくは6脚が一般的)で構成されるロボットのことである。
2足歩行ロボットは自分で組み立てて調整、そしてモーション設計となると、歩かせるだけでもなかなか難しいのが実際のところで、それに対して倒れる心配がまずない多脚ロボットなら、高校生や中学生でも参加しやすいだろう、というわけだ。
アスリートCUP2012で予定している新競技は、その多脚ロボットによる、ロボット自身が判断して動く自律競技「自律ビーチフラッグ」と「20m走」(5mの2往復)だ。アスリートCUPでは、ダンス競技やドレスアップコンテスト、自由パフォーマンスなどを除けば、2足歩行ロボットも自律競技となっており(ビーチフラッグと20m走)、多脚も同様というわけである。
中高生に参加を促すならラジコン感覚のオペレーターが操縦する競技が必要と考えるかも知れないが、コンセプトとして、若年層の理科離れを食い止め、ロボットを通してメカや電気、プログラミングの技術や知識を身につけてもらいたいというのがアスリートCUPなので、すべて自律となっているのである(エキジビションには操縦する部門もある)。
多脚の自律競技の内容については、ロボットゆうえんちのメンバーでもある神奈川工科大学ロボット・メカトロニクス学科の兵頭和人教授がプレゼンテーションを行った。兵藤教授は大学の自身の授業で多脚ロボットを活用しており、生徒たちを数人で1チームに分け、1チームに1台のカメ型ロボットを与えている。前期で機体の組み立て、後期で実際に動かしてみて、最終的には自律ビーチフラッグ競技を行うというカリキュラムだ。

|
|
画像16。神奈川工科大学ロボット・メカトロニクス学科の兵頭和人教授。ロボットゆうえんちのメンバーでもある |
本来、カメ型ロボットは操縦する機体なので、マイコンボードの「mbed」と、超音波センサや測距センサなどを後付けで搭載して、自律ロボットにしているのである。またビーチフラッグ競技とは、センサを搭載した筒が数メートル先に立っており、2台のロボットで争って先に倒した方が勝ちというもの(両サイドから駆け寄っていく場合と、並んでスタートする場合と大きく2通りある)。兵藤教授の授業では、予選は1台ずつでトライして倒すまでのタイムを競って順位を決め、決勝では2台ずつ同一地点からスタートして先にたどり着いた方が勝ち、というスタイルだ。
兵藤教授によれば、多脚ロボットの何がいいかというと、やはり「倒れない」ことが大きいという。近年は、「レゴ・マインドストームNXT」を使ったロボット教室が全国各地で行われているのもあり、ロボット系の学科に入ってくる子たちは、車輪型ロボットなら慣れていて、それだと物足りない、という状況だそうだ。しかし、2足歩行ロボットだと、歩かせるだけでも大変で、歩かないということで心が折れてしまう生徒が多いという。
そこで、車輪型よりもロボットに触れている感があり、なおかつ2足歩行ロボットほど敷居が高くない多脚ロボットがまさに適しているというわけだ(画像17)。多脚型ロボットは自律システムに適した歩行モーションを作りやすく、また自律システムの開発にも専念しやすい点が授業に適しているそうである。

|
|
画像17。兵藤教授の自律カメ型ロボット。左右に超音波センサ、正面に測距センサという組み合わせが、目標をとらえるのに最も安定したセンサ構成だそうだ |
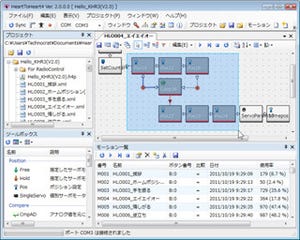
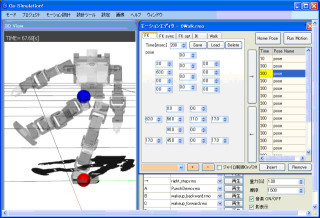
兵藤教授の授業では、ARM Cortex-M3ベースのマイコンボード「mbed」を自律制御用に使用しているほか、超音波センサや測距センサ、地磁気センサ、IMU(慣性)センサ、ゲーム機WiiのIRカメラなどを接続して、先日バージョン2.0.0が公開されたが、近藤科学製のモーションエディタ「HeartToHeart4」を利用してモーションを作成しているそうだ。
なお、アスリートCUPの自律競技では、多脚ロボットの自律制御用にmbedを使うことが絶対条件ではなく、自分なりの方法で自律制御させたロボットで参加することが可能である。mbedを使う場合は、実は兵藤教授が開発した市販されていないボードを1枚かませないとならないので、もし欲しいという人がいたら、応相談ということだ(ロボットゆうえんちでも、参加申し込みが済んだ人に配るといった方法などの対応も考えるとしている)。興味のある方は、ぜひロボットゆうえんちの公式発表を待っていてほしい。