2回目となるBIOMODに日本全国から7チームが参加
昨年からスタートした、米ハーバード大Wyss Instituteが主催する学部生による「国際生体分子デザインコンテスト」の「BIOMOD」。2012年11月にボストンで国際大会が開催予定で、9月9日に日本国内大会(中間発表会)「BIOMOD JAPAN MEETING 2012」が、東京大学本郷キャンパス(画像1)の山上会館で開催された。その模様をお届けする。

|
|
画像1。BIOMOD JAPAN MEETING 2012は東京大学の本郷キャンパスにて行われた(写真は安田講堂) |
BIOMODは、生体分子デザインとあるように、創意工夫をこらした分子を設計・製作し、それをウィキペディアやYouTubeでオンライン発表、そして11月のボストンでのジャンボリーでプレゼンテーションを実施し、その優劣を競うというものだ。昨年は日本から3チームが出場し、総合準優勝や各賞を受賞し、優秀な成果を残したのである。昨年の大会の結果報告については、コチラをご参照いただきたい。
主催は、昨年と同様に、SICE(計測自動制御学会)の調査研究会である分子ロボティクス研究会からまず1つ。そして今年は、文部科学省の科学研究費助成事業の1つである「新学術領域研究(研究領域提案型)」に、「分子ロボティクス 感覚と知能を備えた分子ロボットの創成」が採択され、5年間のプロジェクトがスタート(画像2・3)。同領域も主催となった(分子ロボティクス研究会の主要メンバーが同領域の主要メンバーを構成している)。

|

|
|
画像2。新学術領域研究(研究領域提案型)「分子ロボティクス 感覚と知能を備えた分子ロボットの創成」の研究体制。協力を含めると30名強の研究者が参加している |
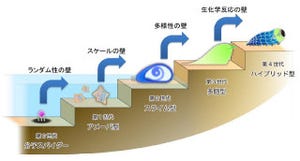
画像3。分子ロボットの研究開発のステップ。「分子ロボティクス 感覚と知能を備えた分子ロボットの創成」の5年間では、第2世代のスライム型までを目指す |
なお、同領域に関するキックオフミーティングが翌10日に開催され、こちらを含めた同領域に関する記事は、コチラでレポートしているので、興味を持った人はそちらも参照していただきたい。
また、分子ロボティクス研究会や新学術領域の関係で、BIOMOD=分子ロボットコンテストに見えてしまうかも知れないが、実際には分子ロボットも含めた生体分子デザインコンテストである(昨年はコンテスト内コンテストとして、分子ロボットコンテストもBIOMODのジャンボリーで開催された)。
もっとも、傾向としては日本は分子ロボットにトライするチームが多い。なお今年は一気に7チームに増え、活況を呈している。さらに本番を想定して、すべて英語でのプレゼンテーションが行われた(質疑応答のみ日本語でもOKだった)。
今回参加した7チームは、東京大学からが3チームで「UT Kasei Runners」、「UT-Hongo」、「UT-Komaba」。東北大学からが2チームで「Team Sendai A」、「Team Sendai B」。関西大学からが1チームで、「Team Kansai」。そして東京工業大学からが1チームで、「Titech Nano-Jugglers」となっている。
1チーム20分の持ち時間を与えられており、プレゼンテーション資料とスピーチを駆使して、自分たちの開発した分子のコンセプトや開発に成功したか否かといったことを紹介、アピールしていくというわけだ。それでは、各チームの内容を紹介する。なお今回は中間発表大会なので、すべての実験に成功したり、結果が出たりしているわけではない。
チーム「UT Kasei Runners」の開発内容
UT Kasei Runnersのタイトルは、「Autonomous DNA runner: a DNA-kinesin hybrid nano-robot」。ウィキペディアのトップページはコチラ(画像4)。

|
|
画像4。UT Kasei Runnersのウィキペディアのトップページ |
内容は、近年になって微細加工技術が発展を遂げ、さまざまな化学回路が実現してきているが、性能向上を目指して流路を微細化すると、流量確保のための圧力が上昇するという問題に直面してしまうことを解決することを目的としている。
この問題を解決するために注目したのが、生命が必要時に必要なタンパク質を必要な量だけ合成しているムダのない輸送系の仕組みだ。流れを作らずともナノスケールで物質を運搬できる生体分子モーターの能動輸送に着目し、生物のようなインテリジェントな輸送機構の構築を目指したのである。
第1歩として、外部シグナルに応答したDNAナノ構造の構造変化をトリガーとして、「無細胞翻訳系PURE system」を用いて分子モーター・タンパク質の「キネシン」を合成(画像5)。荷物を運ぶ様子を蛍光顕微鏡で観察する予定とした。
現時点では、外部シグナルへの選択的応答・モータータンパク質集積化による運搬効率の向上が予想されるという。今回の研究の応用により、環境に応じて必要なタンパク質を合成・利用する自律歩行DNAロボットが可能となるだろうとした(画像6)。

|

|
|
画像5。キネシンによる移動を模式したプレゼンテーション画面 |
画像6。最終的には、このようにして荷物を運ぶようなイメージだという |
チーム「UT-Hongo」の開発内容
続いては、UT-Hongoの「Medical DNA Shell」。ウィキペディアのトップページはコチラだ(画像7)。

|
|
画像7。UT-Hongoのウィキペディアのトップページ |
目的の分子を挟み込む(捕獲する)ことができるというもので、貝がエサを食べるようなイメージから、「DNA Shell」と名付けられている(画像8・9)。DNA Shellが物質を取り込んだかどうかは、Shell本体に付着した大量の蛍光物質によって検知する仕組みだ。

|

|
|
画像8。DNA Shellのイメージ |
画像9。生体分子はナノ~マイクロと、非常にスケールが小さいため、このようにAFM顕微鏡を用いて観察を行う |
マイクロ流体デバイスを使用することで、少量の血液で計測することが可能であるという特徴を活かし、DNA Shellは医療への応用を考えているという。具体的には、血液の凝固に関わる酵素であるトロンビン濃度を測定し、濃度値が高い場合はトロンビンを除去することが可能なシステムにするとしている。
最終的には、少量の血液をデバイスに流すことで病気診断を実施し、その結果を論理回路に入力することで治療薬を提供することができるシステムになるのではないかと、ドラッグデリバリー機能も備えた医療ロボットを考えているとした。
チーム「UT-Komaba」の開発内容
次のUT-Komabaが発表したのは、「DNA tablet」だ。ウィキペディアのトップページは、コチラ(画像10)。
いわゆる、近年所有者が富みに増大しているタブレットをモチーフにしたもので、DNAオリガミを用いて、2つの異なる絵柄を映すことができるというものである(さすがに実際のタブレットのように高精細なグラフィックを好きなように表示するというものではない)。
DNA tabletは、まず安定した状態で存在し、絵柄Aを映し出している。この状態に対してある特定の化学物質を投入することで、安定な状態から変形を開始し、絵柄Bに移行するというわけだ。なお、変形後は絵柄Bで安定した状態になる仕組みである(画像11・12)。逆に絵柄BからAへの変形の場合は異なる化学物質を用いるが、基本は同じ方法で行うとしている。

|

|
|
画像11(左)のパックマンのモンスター(?)から、画像12(右)のメッセージへ。グラフィックの解像度は、大昔のポケコンの液晶モニタぐらい? |
|
チーム「Team Sendai A」の開発内容
4チーム目のTeam Sendai Aのプレゼンテーションのタイトルは「Mother Cube」。ウィキペディアのトップページは、コチラ(画像13)。

|
|
画像13。Team Sendai Aのウィキペディアのトップページ |
このコンセプトは、PCなどの電子部品におけるマザーボードで、さまざまな機能を持った分子ロボットのための集積基板のようなものがあれば、PCのように複雑で多くの機能を持つ分子ロボットの作製への道が開ける、というものである(画像14)。
そこでチームは、DNAオリガミでできた立体構造内に機能分子を格納し、別の構造体と合体することのできるデバイスを提案。そのデバイスが、Mother Cubeというわけだ。
Mother Cubeの実現のためには、DNAオリガミの平面同士の結合法の確立がまず必要だという。オリガミを結合させる方法は、まずハイブリダイゼーションが考えられるが、DNAの持つ電荷により、結合構造体間の距離に制限がある。
そこで、チームはDNAの電荷を打ち消す「脂質」を接着剤として、DNAオリガミを結合させる方法を考案(画像15)。イオンではなく脂質を用いることにした理由は、その形状の多様性に着目したからということであった。なお今回の報告では、主にDNAと脂質の相互作用についての報告が行われた形だ。

|

|
|
画像14。移動用のモーターモジュールと、収納用のドラッグモジュールを組み合わせて、ドラッグデリバリーシステムとするといった使い方を構想中 |
画像15。脂質を接着剤とするための実験。脂質でDNAオリガミを覆ったところを、AFMで撮影したもの |
チーム「Team Sendai B」の開発内容
続いて5チーム目、Team Sendai B。同チーム名のBは、「Basic seminar team」を意味する。発表内容のタイトルは、「D-NApper」だ(Aは小文字でなく大文字)。ウィキペディアのトップページは、[コチラ( http://openwetware.org/wiki/%E5%9F%BA%E7%A4%8E%E3%82%BC%E3%83%9F%E3%83%81%E3%83%BC%E3%83%A0/basicseminarteam )(画像16)。

|
|
画像16。Team Sendai Bのウィキペディアのトップページ |
D-NApperのコンセプトは、これまでの多くの分子ロボットが作製と同時に分子を内包しているような方法で構築されてきたが、それに異を唱えるものである。構造体の筒の中にチームで「セレクター」と名付けた1本鎖DNAの集団を生やすことで、目的の分子を後から捕獲できるようなロボットとした。
セレクターは目的とするDNAを遠くから捕獲、選別し筒の内部にDNAを運ぶ役割を持つ(画像17・18)。これによりロボットの作製後に遠くから目的のDNAを選別して取り込み、内部への収納が行え、また内部の捕獲機構の構造を一部設計変更するだけでさまざまな分子を捕獲・収納することができるというわけだ。

|

|
|
画像17。D-NApperのイメージ |
画像18。いかんせん、対象物が非常に小さいため、なかなか何かの反応を直接見るのは難しいため、電気泳動なども駆使して、間接的に確認していくしかない |
今回のプロジェクトではターゲットをDNAとしているが、最終的にはタンパク質やmRNAなど、さまざまなナノスケール分子を捕獲する機能を持ったロボットの作製を目指しており、医療分野などで活躍を期待しているとした。
なお現在は、セレクターの動作確認とロボット本体の製造を行っており、今後の実験ではそれらを組み合わせたロボットの完成を目指すとしている。
チーム「Team Kansai」の開発内容
そして、西日本から唯一の出場なのが、Team Kansaiだ。ウィキペディアのトップページは、コチラ(画像19)。

|
|
画像19。Team Kansaiのウィキペディアのトップページ |
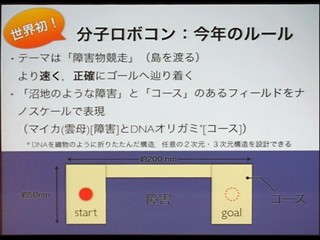
昨年の内容を引き継ぐ形で、「Molecular NINJA Returns」というタイルで発表された。昨年のBIOMODのジャンボリーでは、トライアルとしてコンテスト内コンテストの「分子ロボットコンテスト」が開催されたのであるが、コンテストの内容は、逆コの字型のステージを分子スパイダーでスタートからゴールまで歩かせ、その早さを競うというものだった。
Team KansaiとTeam Sendai(今年のTeam Sendai Aの前身に当たる)、そしてデンマークの3チームが参加し、Team Kansaiは、ステージの製作も担当。そして、チームとしては、ステージに組み合わせる形で凸型のDNAオリガミの追加ステージを作製し、ステージとその合体させた凸型DANオリガミの間の溝(わざと空けてある)を、分子スパイダーにショートカットさせる形で、スタートからゴールまでほぼ直線的に移動させようとしたのである(画像20)。

|
|
画像20。昨年は、分子ロボコンで、逆コの字型のステージをショートカットするという手法に挑戦した |
結局、分子スパイダー、ステージ、凸型DNAオリガミの作製、ステージと凸型DNAオリガミの合体には成功したが、分子スパイダーを歩かせるまでには至らず、今回はそのリベンジ、というわけだ。ちなみに溝を移動する分子スパイダーを、水グモで水面を渡る忍者に見立てたことから、Molecular NINJA(分子忍者)なのである。
そして今回は、DNAオリガミを構成するステープルDNAの縦1列分を加えずに作製すると、生じた空間の塩基対がむき出しになった部分同士がスタッキング相互作用することにより、本来の構造体の大きさよりも縮むことを利用した、忍者らしい(?)変身的な仕組みも考案。実際に作製してみると、予想通り縮んだ構造体を作製することに成功したという。
このことを利用して、DNAオリガミで縮んだ状態の構造体を作製し、そこにさらにステープルDNAを加えることで、忍者が変化の術を使っているかのように形状変化するデバイスの作製を目指したのが、今年の挑戦というわけである(画像21)。

|
|
画像21。今年はDNAオリガミのデザインを変化させることに挑戦。ニコニコマーク(?)がサイクロプスに変身 |
チーム「Titech Nano-Jugglers」の開発内容
最後は、Titech Nano-Jugglersによる「Photo-Controlled JET - Rail Free & High Speed Molecular Robot -」だ。ウィキペディアのトップページは、コチラ(画像22)。

|
|
画像22。Titech Nano-Jugglersのウィキペディアのトップページ |
現状の分子ロボットとして、分子スパイダー(DNAウォーカー)や、キネシン分子モーターを利用したものなどが提案されているのだが、チームはその問題点として、鉄道のようにあらかじめ用意された線路上を一方通行しかできない、という点を挙げる。
そこで今回チームが考案したのが、線路から脱却した新しいシステムによって、自在に移動できる分子ロボット「Photo-Controlled JET」というわけだ。
この分子ロボットは機体となるビーズの表面に取り付けた白金の触媒反応がエンジンとなり、酸素をJET機のように噴射して高速で進む。しかも、実際のロケット同様に、多段式の構造を取り入れている(画像23・24)。

|

|
|
画像23。ロケットとはいっても、機体はビーズなのでイメージ的には気球っぽい? |
画像24。多段式の構造を備えさせる計画で、そうした点ではロケットらしいといえる |
機体と白金の接着には光スイッチング機能を持たせたDNAを設計し、外部からの光照射に応答した白金の脱離を行うという仕組みだ。エンジンとなる白金のつく部位と量を光スイッチングによって制御し、進路と速度を変えるという機体の複雑な操縦を可能にするという。
将来的にこの高い機動力は、単なる動力装置として活用されるだけでなく、生体内で起こる複雑な物質輸送を模したネットワーク構築も可能にすると確信しているとした。
プレゼンターとして分子ロボットの先駆者、コロンビア大Milan Stojanovic博士も登場
以上、今年は昨年の倍以上となる7チームによるプレゼンテーションが行われた。そして、審査員による審査で、1位、2位、3位(審査員特別賞)が決定。1位の報償は、学生ボストン往復旅行費5人分相当で、2位が同じく3人分相当。3位以下は2人分相当。また3位のプレゼンターを、分子スパイダーを開発した、この日のスペシャルゲストであるコロンビア大学のMilan Stojanovic博士が務めt。なお同博士は、この日、英語による特別講演も実施している(画像25・26)。

|

|
|
画像25。コロンビア大学のMilan Stojanovic博士。分子ロボットの先駆者である |
画像26。貴重な講演も行われた |
今回の評価方法は、「後半戦に向け、各チームのフィードバックを重視」と、「BIOMODのジャンボリーの評価基準を基にウィキペディア、アブストラクト、プレゼンテーションの内容を点数化して評価」というものだ。
結果は、3位が「Autonomous DNA runner: a DNA-kinesin hybrid nano-robot」をプレゼンテーションしたUT Kasei Runners。2位が「DNA tablet」のUT-Komaba。そして栄えある1位が、「Photo-Controlled JET - Rail Free & High Speed Molecular Robot -」のTitech Nano-Jugglersとなった。Titech Nano-JugglersのPhoto-Controlled JETは、個人的にも独創性が高い印象があり、1位を獲得したのもうなずけるというものだ。
この後、各チームは今回のプレゼンテーションで指導者の先生たちによって指摘された部分の問題を解決したり、理論武装をより強化したりするなどして、本番に挑む。昨年は、日本は好成績を収めており、ぜひ今年も活躍してもらいたい。また結果報告会などが行われるものと思うので、BIOMOD 2012のジャンボリーの結果は、改めてお伝えしたい。