World Robot Summit 2018(WRS 2018)の展示会場において、人機一体は「MMSEBattroid ver.1.2」「パワーペダル ver.4.2」を出展し、動作デモを披露していた。それぞれ、同社が目指す4mサイズの「人型重機」における、上半身と下半身の試作機となるもの。大型ロボットはさすがに迫力があり、デモ時はいつも見学者でごった返していた。
-
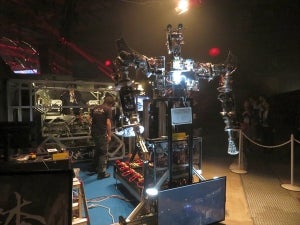
人機一体のブース。手前は双腕ロボットの「MMSEBattroid ver.1.2」だ
-
マスター側の操作機はかなり大きい。搭乗しているのは開発者の金岡博士


MMSEBattroidとパワーペダルは、マスタースレーブ方式で操縦するロボット。マスター側の装置には、6自由度のパラレルリンクロボットが4台設置されており、スレーブ側ロボットの両手両足を直感的に操作することが可能だ。大きな特徴は双方向のバイラテラル制御であることで、スレーブ側の接触なども感じられるようになっている。
上半身に相当するMMSEBattroidは、双腕型のロボット。頭部にはカメラも搭載しており、操縦者はまるでその場にいるような感覚で操作できる。パワーは10~20倍も増幅することが可能とのことで、重労働でも操縦者への負担は小さい。
一方、下半身のパワーペダルは、2足歩行のロボット。こちらにはオートバランスの機能が備わっており、片足を大きく上げたり、上げた足の下に段差を入れるなどのデモが披露された。将来的には、不整地の歩行も可能になる予定だ。
-
パワーペダルは、オートバランスにより、押しても引いても安定している
-
片足を大きく上げたところ。不整地対応のため、3点で接地する方式を採用


両ロボットはそれぞれ高さ2mクラス。これがそのまま4mの人型重機の上半身と下半身になるわけではないものの、サイズとしては同等であり、同社は人型重機を実現できるだけの技術を保有していることをアピールする。
パワーペダルのデモ。その後、上半身と下半身を初めて同時に操作するというオマケも
今回公開されたのはマイナーアップデートされた機体で、従来からあまり大きな変更点はない。ただ、開発者である同社の金岡博士によれば、今後、MMSEBattroidには指を追加、パワーペダルは足裏を小型軽量化するなどの改良を施して、2019年初頭に最終版を完成させる予定だという。
-
現在の手先はこんな感じ。指が付けば、より汎用性が増すだろう

従来は、その次のステップとして、4mの人型重機を開発すると説明していたが、今回、その1つ前段階として、2019年末までに一回り小型の試作機を開発することが明らかにされた。身長は2~2.5m程度を予定。まず全身版の小型機で問題を一通り潰してから、フルサイズの人型重機の開発を始め、2020年のWRS本大会での公開を目指すという。