情報通信研究機構(NICT)は5月16日、同機構における5G技術の実現に向けた取り組みについての説明会を実施。今後のNICTの活動方針、および現在注力している「知的交通インフラ構築」に関する取り組みなどについての説明を行った。
注力するは、外部連携の強化
NICTは現在、同機構の掲げている第4期中長期計画(期間:2016~2020年度)の最中にある。中期計画の折り返し地点となる本年度(2018年度)においてNICTは、2020年度までの各計画の達成を目指すと同時に、2021年度よりスタートする第5期中朝計画に向けて新たな活動の方向性の検討も行っている段階だ。
そうした状況の中、NICTの徳田英幸 理事長は、新たな中期計画への布石として、「より外部との連携を強めていくための活動に注力していく」と語る。
-
「5G実現に向けた情報通信研究機構(NICT)の取り組み」について説明した、NICTの徳田英幸 理事長

具体的には、「今後重点的に取り組むべき研究トピックに関して、各分野のトップクラスの研究者を集め、泊まり込みでやるようなサミット形式のディスカッションをするような機会を設けたい」と同氏。そのほかにも、全国でアイデアソンを開催し、NICTの研究開発リソースやスキームを活用することで、より多くのアイデア・技術の社会実装につなげたいなどと説明した。
-
NICTの平成30年(2018年)度の活動の方向性。より外部とのコラボレーションを進めていくために、ハッカソンやディスカッションなどの機会を多く設けていくとのこと

5Gを活用した知的交通インフラの構築へ
また続いて、NICT ワイヤレスネットワーク総合研究センター ワイヤレスシステム研究室の石津健太郎 研究マネージャーにより、来たる5G時代の到来を見越してNICTが注力している研究についての説明がなされた。
-
NICT ワイヤレスネットワーク総合研究センター ワイヤレスシステム研究室の石津健太郎 研究マネージャー

石津氏が行っているのは、5Gの超低遅延性を活用した「知的交通インフラ」の構築に関する研究だ。「近い将来、自律型モビリティの普及が期待される一方、自律型モビリティ単独での情報収集には限界がある。そのため知的交通インフラを活用することで、スムーズな運転の実現に貢献する」と同氏。
具体的には、自動車の自律走行に不可欠なダイナミックマップ(高度地図データベース)の構築を目指しているとのこと。ダイナミックマップとは、さまざまなセンサ情報で収集することにより、人や車、バイクなどの移動体によって刻々と変化する立体的な地図情報を含んだ地図のことだ。
-
ダイナミックマップ(高度地図データベース)の概要。

「電子カーブミラー」で死角情報を収集
すでにNICTは、5Gを活用した無線通信を用いて、横須賀リサーチパーク(YRP)内に模擬交差点の試験環境を構築しているという。さらに同環境下において、カメラ/センサを内蔵し、移動体や障害物の位置・速度・種類などをリアルタイムに認識可能な「電子カーブミラー」を活用することで、道路状況の情報を収集し、見通しの悪い交差点付近における道路環境を把握することに成功したという。
-
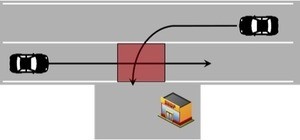
今回発表された電子カーブミラーの効果について。センサと無線通信を活用し、交通環境のリアルタイム認識を実現する
-
電子カーブミラーの概要。ステレオカメラやLRF(Laser Range Finder)を内蔵しており、交通状況や道路状態を認識してその情報を無線通信によりサーバに提供する


この電子カーブミラーによって得られた情報は、画像圧縮や切り出しなどの情報処理によりデータ量が削減され、5Gを模擬した無線システムによりエッジサーバに送信される。その後はエッジサーバにおいて、必要となる特徴量(位置、速度、種類など)を抽出し、ダイナミックマップへと反映することによって、道路環境の変化を認識することができる。
-
電子カーブミラーによって得られた情報は、必要な一部の情報のみが抽出され、ダイナミックマップや移動体(車やドローンなど)にを伝えられる

また、無線通信に起因する伝送時間の差異を吸収するために、認識した情報にはセンサ間で同期されたタイムスタンプが付与される。その後、エッジサーバにおいてセンサ情報が統合され、同時刻の道路環境のスナップショットが生成されることとなる。
これらの仕組みによりNICTは、データ量の削減によって無線資源を効率的に利用しながらも、多数のセンサを活用して道路環境を高信頼に把握できることを確認したとのこと。
なお今後は、構築した環境において5Gシステムを導入し、さまざまな無線システムとの性能を比較評価するとともに、物体数や移動速度が異なる場合や管理対象エリアが広い場合など、条件が異なる場合に求められる機能条件を確認して、より高度な自律型モビリティ社会の実現に必要な技術として確立させることを目指すとしている。