内閣府革新的研究開発推進プログラム(ImPACT)は、プラント巡回点検を目的として、狭所進入性能と障害物乗り越え性能を両立したヘビ型ロボット「T2 Snake-3」を開発したと発表した。

|

|
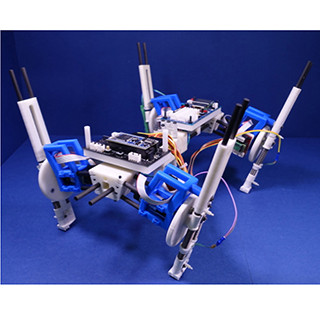
ヘビ型ロボット「T2 Snake-3」 |
高さ1mの段差登り |
「T2 Snake-3」は、胴体の「細さ」を生かして狭路の移動、胴体の「長さ」を生かして高さ最大1mの段差や階段を登ることができるロボット。内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの一環として、電気通信大学大学院情報理工学研究科の田中基康准教授、金沢大学理工研究域機械工学系の鈴木陽介助教らが開発した。ImPACTタフ・ロボティクス・チャレンジでは災害直後や復旧時に活躍する災害対応ロボットだけでなく、平常時における点検、補強、修繕といった「予防・減災」を目的としたロボットの研究開発が行われており、同研究グループでは、平常時におけるプラント内の巡回点検を目的とした災害予防ロボットの研究開発に取り組んでいるという。
プラントは、狭く入り組んだ構造をしているため、点検時には狭い通路や勾配の急な階段を通り、時には配管の上をまたいだり下をくぐったり、といった動作をしながら移動する必要がある。そのため同研究グループでは、細長いヘビ型ロボット「T2 Snake-3」を開発。車輪部を関節で直列に連結したロボットで、17個の関節用モータと10個の車輪用モータが搭載されており、全長1730mm、重さは約9kgとなっている。このロボットは、多数の関節で連結された細長いヘビのような構造で、関節動作によって形状を自在に変化することで高さ120mm×幅250mmの狭路を移動することができる。また、ロボットの最大高さは地面から120mmと非常に低いため、上方にせり出した配管などの障害物をくぐりやすく、胴体の「長さ」を生かして最大で高さ1mの段差障害物を乗り越えることができる。さらに、ロボットの先頭を持ち上げてロボットアームのように動作することもできるため、先頭部にロボットハンドを搭載することで、操作盤の操作や小物体拾いといったプラント点検で行われる軽作業が可能になると見込まれている。さらに、壁に寄りかかることで先頭部を大きく持ち上げることができ、地面から高い位置の計器を見ることや障害物の向こう側をのぞき込むことが可能で、点検時における視認への活用が期待できるということだ。

|
近接覚センサ |
さらに、同ロボットは、周囲環境までの距離や傾きを計測できる近接覚センサが各胴体底部に搭載されており、その情報を用いて階段を巧みに登り降りすることもできる。このセンサは、複数配置された赤外光反射型フォトセンサの出力をアナログ演算回路で統合することにより、周囲環境までの距離や傾きを非接触で計測でき、高速応答かつ省配線という特徴があるという。通常、階段はロボットの連結部分と各段差の縁との接触が頻発し、連結部分が段差に引っかかり動作不能になってしまうため、ヘビ型ロボットにとって移動が難しい環境だが、このロボットは搭載されたセンサにより車輪の接地状態を検出し、適切なタイミングで関節を動かすことが可能となっている。これにより、連結部分が段差に引っかかることなく着実に階段を登り降りすることを実現した。
また、同ロボットはカメラとバッテリが搭載されており、先頭と最後尾の映像を見ながら無線遠隔操縦で約1時間動作することができる。同ロボットは1対の車輪のうち、片側のみをモータ駆動輪、もう片側を空回りする受動輪とし、受動輪の内側にバッテリを配置することで、全身に小型のバッテリを分散的に配置するができ、ロボットの小型化と1時間の動作時間を実現した。操縦は簡易な操作用コントローラ(ゲームパッド)を用いて行われ、比較的簡単な操作で前述の動作を行うことができる。操縦者は基本的にロボット先頭の動きだけを指示し、ロボットは開発されたアルゴリズムに従い、指示された先頭の動きに追随して最後尾までの胴体の動きを生成し実行するため、操作者の育成にかかる時間が短縮され、現場への導入がスムーズに行えるという。
今後は、現在は直線状にしか昇降できない階段移動を、今後はらせん階段の昇降の実現を目指し、プラントにおいて移動可能な場所を増やすという。また、ロボットに何らかの故障が生じたときにも動作を継続するための故障時制御方法についても検討を行っているということだ。また、ImPACTタフ・ロボティクス・チャレンジ内で開発されているロボットハンドとの統合を行い、移動能力だけでなく作業能力も備えたヘビ型ロボットの実現を目指すということだ。