日本初の民間月面探査チーム「HAKUTO」は2月24日、米Astrobotic Technology(Astrobotic)と月面輸送契約を結び、Astroboticの月面着陸機に相乗りして2016年後半に打ち上げを実施すると発表した。
同チームはGoogleが主催している国際宇宙開発レース「Google Lunar XPRIZE(GLXP)」に月面探査ローバーの開発で日本から唯一参加しており、今年1月には走行部門で中間賞を獲得するなどその技術力は高い評価を得ている。一方のAstroboticはローバーに加えてランダーを開発しており、GLXPの中間賞で走行・着陸・画像処理の全3部門を受賞した。
今回の決定は開発スケジュール・コスト・システム要件などの観点からAstroboticのランダー「Griffin」に相乗りすることが、最もGXLPミッションの成功率が高いとの判断によるもの。「Griffin」にはHakutoのローバー「Moonraker」と「Tetris」に加えて、Astroboticのローバー「Andy」も搭載され、SpaceXのFalcon9ロケットで米フロリダ州ケープカナベルから月を目指すことになる。
月面の着陸予定地点「Lacus Mortis pit」は地下の溶岩トンネルにつながる縦孔が存在すると考えられており、着陸後、GXLPのミッションに加えて月面の縦孔探査も行う予定。HAKUTOは月面の縦孔を発見することができれば、厳しい温度変化や宇宙放射線の影響から身を守れる天然の月面シェルターとして将来の月面有人探査などで活用できる可能性があるとしている。

|
|
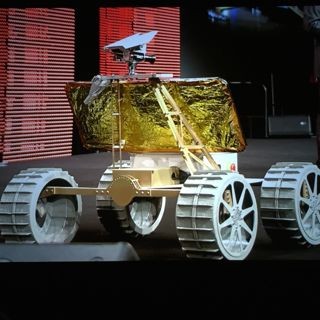
GXLP中間賞を受賞した月面探査ローバー「Moonraker」 |