ロボットにフォーカスするベンチャー企業のZMPが自動運転車の実用化を早めたいという思いを強め、できるところから始める姿勢を鮮明にした。ZMPはこのほどZMPフォーラムを開催、ソニーと提携したドローンの新会社を設立したことに加え、自動運転に向けた4つの取り組みを公開した。
1つは自動運転を国内でもすぐに実現できそうな環境として駐車場を選び、駐車場ビジネスを経営するパーク24と共同で、駐車場における自動駐車の実証実験を始めると発表した。2つ目は、自動運転車を乗用車に限定せず、台車にまで広げ、自動運転台車を倉庫など物流拠点での使用を考えた。3つ目は純粋に技術的な試みで、レーザースキャナ(LIDAR)を開発している独IBEOと共同開発に合意し、LIDAR搭載車の受注を開始した。最後は、Intelのチップを使い、自動運転に必要な、「物体認識」、「判断」、制御のための「操作」の内、認識と判断を司る機能を実現するためのハードウェアプラットフォームとソフトウェアを販売開始した。
これらはすべて、自動運転を早期に実現するための戦術である。自動運転車は、人の手を介さずクルマを安全に走行させ目的地に人や物を運ぶテクノロジーである。公道を走る場合には、事故の想定、ハッキングによる暴走、認識ミスによる誤動作などを十分に防ぐ手立てが必要である。加えて、法律的には運転手をどう規定するのか、人による運転と自動運転との混在で問題は生じないのか、自動運転に向いた標識の改善、自動車学校の必要性、警察交通組織の変革など、社会的な問題が山積している。技術的にできても公道を走るための社会的な準備はまったくできておらず、実現するためのハードルは極めて高い。技術だけ磨いても、2020年に実用化できる可能性は限りなく低い。社会問題を考えると、公道を走る実用化は2030年~2040年ごろではないだろうか。
まずは駐車場で実証実験
技術的にはそれまでには完璧にしておく必要がある。そのためにもまずは実証実験が重要なカギを握る。日本では、公道の走行は許されなくても私道なら、限られた人間が責任を持って走らせることができる。私道の1つが駐車場内だ。ZMPは駐車場での自動運転を想定した実証実験を駐車場会社のパーク24と共同で行うことを発表した。
駐車場を実証実験に選んだ理由は私道だけではない。全国1万6504カ所、63万4029台分の駐車場を持つパーク24の経営企画本部グループ企画部次長の籠橋信彰氏(図1)によると、自社調査の結果、駐車が苦手な人が全体の16%、バックが苦手な人が同22%もいる上に、車両保険で利用された事故の内、約3割が駐車場内で発生しているという。すなわち、駐車場内を自動運転化すれば、事故は減るだろう、との想いで ある。

|
|
図1 パーク24の経営企画本部グループ企画部次長の籠橋信彰氏 |
ただし、駐車場での自動走行では、白線などの目印や、通り道に配置するビーコンなどが必要だろうが、実証実験を通して、駐車場で必要なモノを把握し、検証していく。また、従来の手動運転と自動運転車との衝突事故や路上に飛び出す人との接触事故などの想定に関しては、実験する駐車場では人が立ち入らないようにする、と籠橋氏は述べた。さらに、自動運転に向いた駐車場とはどのような場所か、という課題にも答えを出せる。パーク24が業務の一環として行っているカーシェアリングサービスでも自動運転車の実験はやりやすいとみている。
台車も自律運転目指す
自動運転は乗用車だけではない。倉庫や物流センター内でも、例えば1人で台車を何台も運びたい、という要求がある。倉庫では少しでも多くの荷物をトラックから倉庫へ台車に乗せて運ぶためだ。これまでは人がトラックと倉庫の間を何度も往復し、荷物を倉庫に納めていた。この作業を効率化したい。
特に人手の数が限られている場合、1人で何度も往復すると時間がかかり、トラックがなかなか空かない。台車に追尾機能を設けることで、1台の台車を押しながら、2台目、3台目の台車がカルガモの親子のように付いてくると作業効率は向上する。ZMPが開発した台車「CarriRo(キャリロ)」には、カルガモ機能(図2)や、坂道を登る時に負荷を軽減するアシスト機能、さらに限られたエリア内を自律走行する機能を持っている。

|
|
図2 自動追尾するカルガモ機能のデモ |
台車にはWi-Fi通信を設置することも可能で、台車の運用時間や走行距離、走行時間などのデータをクラウドに上げて、本社で管理することもできる。また、倉庫内の自律走行では、すでにTHKと共同で実験を進めている。この実験では、ビーコンを倉庫内のコーナーなどに数カ所設置し、複数のビーコンからの電波を台車が受けることで、1つのビーコンからは遠ざかり、別のビーコンからは近づく、ことを認識、これによって台車が自分の走行場所を知り、目的地へと進む。
LIDARシステムで独社とコラボ
自律運転で欠かせないのが障害物との距離をレーザーで測るLIDAR(Light Detection and Ranging)システムである。グーグルカーの屋根に乗ってぐるぐる回っている装置がそれだ。ZMPは、独IBEOとLIDARシステムを用いた自律運転車の共同開発に合意した。IBEOは、1998年創業で、LIDARシステムのハードウェアとソフトウェアを開発している企業で、クルマグレードの品質を提供できる企業だという。
LIDARは物体をレーザーの反射によって検出し、走っているクルマの速度とレーザー光の反射によるドップラー効果を考慮に入れることで距離を知ることができる。現在IBEOが設計生産しているLIDARシステム(同社はレーザースキャナと呼んでいるが、半導体の露光装置でもレーザースキャナと呼ばれるものがあり、混同を避けるためここではLIDARで統一する)製品には、だいたい0.3m~150m程度のものがある(図3)。

|
|
図3 IBEOが提供しているLIDAR製品(下の2つ)と開発品(上の2つ) |
LIDARシステムは距離の精度が高いため、高精度な地図を作ることも可能になる。従来のGPSでは精度が低いため、正確な地図を作ろうとするとLIDARシステムが必要になる。また、GPSよりも精度の高いGNSS(Global Navigation Satellite System)の場合でさえ、ビルの反射によるマルチパスがあると精度が悪くなる。ZMPがIBEOと共同開発するプロジェクトには正確な地図の作製も含まれている。
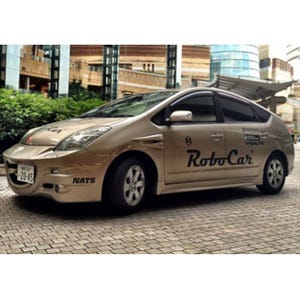
ZMPが開発した自動運転車ロボットカーには、クルマのフロントに3個、リアに2個搭載している(図4)。ECU(電子制御ユニット)にはこれらのセンサを制御するセンサフュージョン回路を搭載しており、ECUを使って認識、さらにトラッキングも行っている。基準となるランドマークの位置を地図データとマッチングしておけば、自分のクルマの位置を検出できる。

|
|
図4 LIDARを搭載したZMPの自動運転ロボットカー。最前と左角の近くに設置 |
Intelと協力して開発ツールを提供
ZMPは自動運転車を普及させるため、IntelのCPUを使ったリファレンスボードとしての車載コンピュータ「IZAC(Intel ZMP Autonomous Computer:アイザック)」の販売を開始した。
自動運転では、周辺の物体を検出、認識、判断する必要がある(図5)。判断結果によって、止まる、曲がる、走る、といったクルマ本来の制御を行う。物体を検出するためにLIDARやレーダーなどのセンサがある。センサからのデータを認識や判断するためには、演算能力の高いCPUが求められる。ここにIntelのプロセッサを使う。

|
|
図5 自動運転では物体の検出、認識、判断に高度の演算能力を使う (出典:ZMP) |
開発ボードIZACには、Intel Core i7プロセッサをメインCPUとして使い、リアルタイムを要求されるタスクと、要求されないタスクを制御できるようにしている。さらに、ZMPにはこれまで培ってきた障害物回避、レーン検出などの自動運転アルゴリズムを持っているため、これらをソフトウェアコンポーネントとして順次販売していく。これらのコンポーネントを利用して、顧客は独自のアプリケーションを実装する。
クルマの中では、複数のIZACを演算重視のECUとして使い、それぞれのIZACをギガビットEthernetで結ぶ(図6)。例えば、LIDARシステムからの情報処理を担うIZAC、ステレオカメラを使って前方の物体を検出認識するIZAC、あるいはクルマの制御系と結ばれたCANを通し、IZACと結び制御系の中心に据えることもZMPは考えている。

|
|
図6 車載コンピュータIZACをギガビットEthernetで結ぶ (出典:ZMP) |
ZMPは2020年までに公道実験できるように政府に申請しているが、日本では許可が落ちない恐れがあるため、シンガポールなど海外での公道実験も申請している。自動運転に向けて打てる手はすべて打っていくという姿勢がZMPにはある。