長崎大学、海洋未来イノベーション機構山本郁夫教授らの研究グループは7月19日、赤潮等海水検査のために開発した赤潮サンプリング飛行ロボット(AKABOT)による実海域での海水採水試験に成功したと発表した。
|
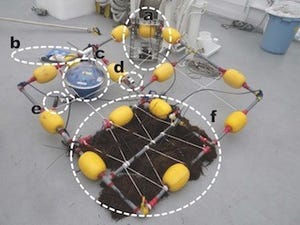
AKABOTの飛行採水機能試験の様子(出所:長崎大学webサイト) |
|
同ロボットは重量6.4kg、速度7m/sで2kmの距離まで飛び、ホバリングしながらコンピュータ制御で採水装置を5mの長さまで送り出し、海水をサンプリング可能で、採水後海水をロボットに収納し帰還する。また、採水装置先端にはカメラを装備し、海面の状況をリアルタイム画像で把握できる。さらに、遠隔操縦による飛行と自己位置情報を検知できるため自動飛行も可能となる。
同機構では、このロボットについて開発を進めているインテリジェント養殖システムの重要技術として活用するとともに、人工衛星の海域環境情報との連動やロボット搭載カメラによる赤潮判別やサンプリング水の瞬時成分分析など、IoT技術と組み合わせたスピーディな環境対策システムとして開発を進めていく予定だとした。