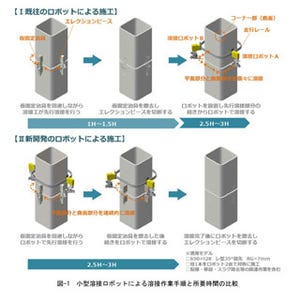
千葉工業大学(千葉工大)は1月13日、遠隔操作型の小型探査ロボット「CHERI」にカメラを搭載した天井裏点検システムを大成建設と共同で開発したと発表した。

|
「CHERI」はCompact(小型)、High mobility(高踏破性)、Enhanced oprability(高操作性)、Research Instrument(調査ロボット)の略 |
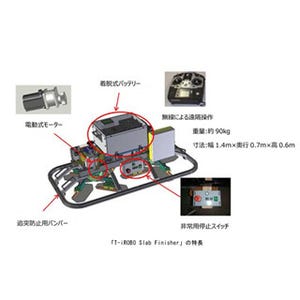
「CHERI」は千葉工大が開発し、福島原発の建屋内探査に用いられたロボットを小型化したもの。全長350mm、幅250mm、高さ90mm、重量4.5kgと小型・軽量ながら高さ150mmの段差踏破性能を有する。本体に2カ所、端部に4カ所のクローラ方式の駆動部を備え、端部4カ所が段差や隙間に応じて個別に角度を変える。連続で2時間稼働できる。

|

|
ロボットの概要(資料提供:千葉工業大学) |
点検口から天井裏に投入する(資料提供:千葉工業大学) |
近年、地震による天井仕上げ材の崩落事故などが発生しており、建築物を維持管理するための劣化診断や耐震診断などの点検作業の重要性が高まっている。しかし、一般的な建築物の天井裏内部は狭くて暗いほか、各種配線などが多数存在し、人が入り込んで点検することが難しい。
今回開発したシステムでは、同ロボットに天井内で撮影可能なカメラ機構を搭載。同システムにより、これまで目視点検ではカバーできなかった箇所の各種画像・映像情報を取得することで、より詳細な点検作業を実現する。また、画像・映像として記録を残せるため、次の点検時に前の状態と比較できるというメリットもある。
CHERIは天井部材の約65mm程度の段差を容易に乗り越えられるほか、ダクトや配管下の隙間が約100mm以上あれば、潜り抜けられる。カメラはロボット前方に搭載され、付属のLEDライトを点灯して10ルクス程度の光量でも鮮明なカメラ映像をリアルタイムに静止画および動画で記録・保存できる。また、カメラのリフトアップ機能により、最大で300mmまで撮影高さを調整できる。ロボットとカメラは無線LANで制御する。
都内で開催された発表会で行われたデモンストレーションでは天井裏に見立てたコースを走行。踏破性能とカメラ機構をアピールしたほか、クローラ方式は車輪に比べて床面(この場合は天井板)に与える衝撃が少ないため安全性が高いとの説明もあった。会場の電波環境が思わしくなく、デモを開始するのに手間取る場面もあったが、原発での経験を活かして電波強度を高めていくとした。

|

|
デモコースを走行するCHERI |
タブレットにカメラ画像、PCにロボットの傾きなどを表示。ゆくゆくは統合したいとのこと |
千葉工大と大成建設はすでに5カ所で実証実験を行っており、今後、建物点検業務を行う調査会社などと連携を図りながら、実際の建物への適用を積み重ね、本格的な実用化を目指すとしている。